目录
- 目录
- mini-batch梯度下降
- 理解mini-batch梯度下降?
- 指数加权平均
- 理解指数加权平均数
- 指数加权平均的偏差修正
- 动量梯度下降法
- RMSprop
- Adam优化算法
- 学习速率衰减
- 局部最优问题
- 参考
mini-batch梯度下降
- 优化算法:神经网络运行更快
- mini-batch vs batch:
- batch:对整个训练集执行梯度下降
- mini-batch:把训练集分割为小一点的子集,每次对其中一个子集执行梯度下降
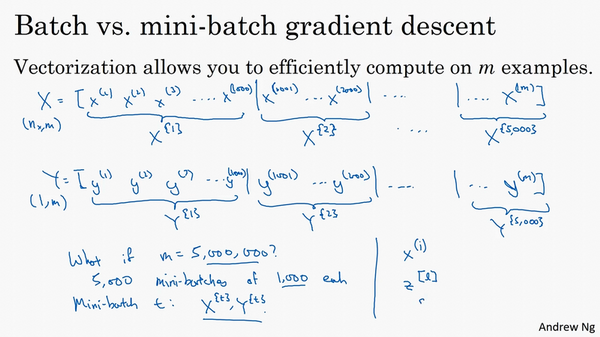
- 比如有5000000个样本,每1000个样本作为一个子集,那么可得到5000个子集
- 用括号右上标表示:\(X^{\{1\}},...,X^{\{5000\}}\)
- 训练:
- 训练和之前的batch梯度下降一致,只不过现在的样本是在每一个子集上进行
-
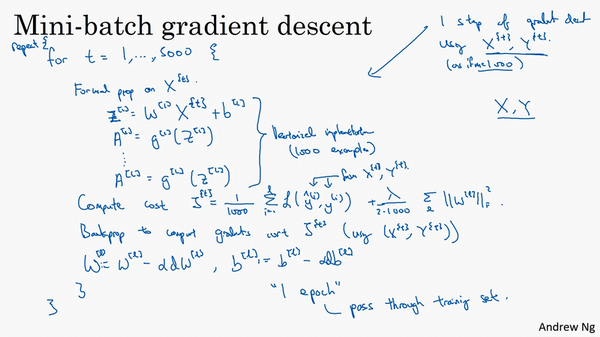
对于每一个batch,前向传播计算,计算Z,A,损失函数,再反向传播,计算梯度,更新参数 =》 这是完成一个min-batch样本的操作,比如这里是1000个样本
- 遍历完所有的batch(这里是5000),就完成了一次所有样本的遍历,称为“一代”,也就是一个epoc
- batch:一次遍历训练集做一个梯度下降
- mini-batch:一次遍历训练集做batch-num个(这里是5000)梯度下降
- 运行会更快
- 训练和之前的batch梯度下降一致,只不过现在的样本是在每一个子集上进行
理解mini-batch梯度下降?
- 成本函数比较?
- 两者的成本函数如下:
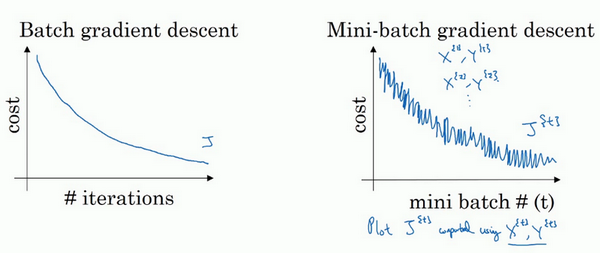
- 可以看到,整体的趋势都是随着迭代次数增加在不断降低的
- 但是batch情况下是单调下降的,而mini-batch则会出现波动性,有的mini-batch是上升的
- 为什么有的mini-batch是上升的?有的是比较难计算的min-batch,会导致成本变高(那为啥还要min-batch?因为快呀!!!)。
- 两者的成本函数如下:
- mini-batch size:
- 看两个极端情况
- size=m:batch梯度下降
-
size=1:随机梯度下降

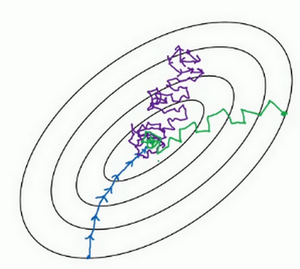
- 收敛情况不同:
- batch梯度下降:会收敛到最小,但是比较慢【蓝色】
- 随机梯度下降:不会收敛到最小,在最小附近波动【紫色】
-
合适的mini-batch梯度下降:较快的速度收敛到最小【绿色】
- 小训练集:m<2000,使用batch梯度下降即可
- 大训练集:mini-batch一般选为2的n次方的数目,比如64,128,256。64-512比较常见。
指数加权平均
- 还有一些比mini-batach梯度下降更快的算法
- 基础是指数加权平均
- 核心公式:\(v_t = \beta v_{t-1}+(1-\beta)\theta_t\)
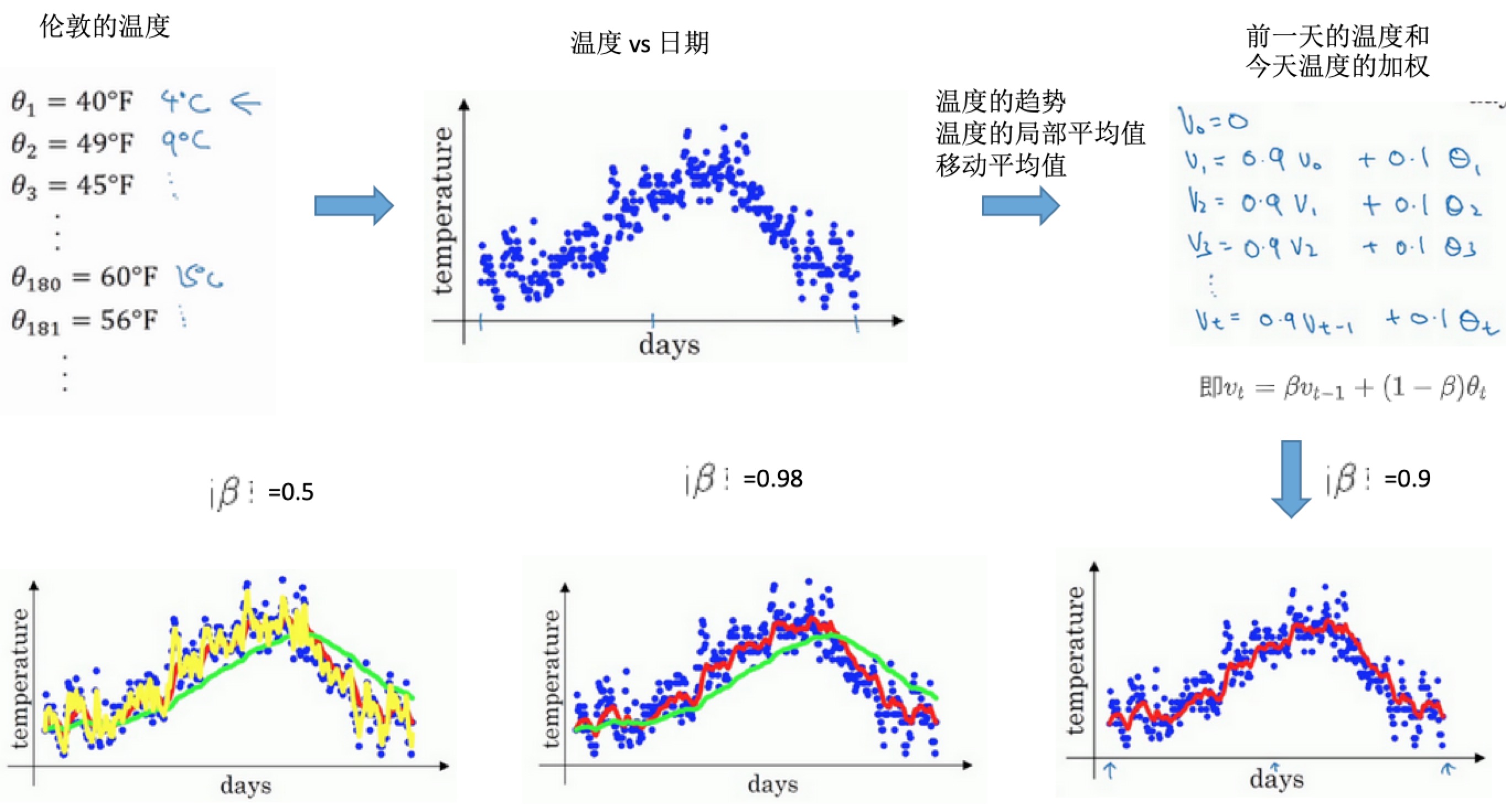
- 得到的是指数加权平均数
- 表示:大概是\(\frac{1}{1-\beta}\)天的平均温度
- 比如\(\beta=0.9\)时,是\(\frac{1}{1-0.9}=10\)天的平均值(上图红线部分)
- 比如\(\beta=0.98\)时,是\(\frac{1}{1-0.98}=50\)天的平均值(上图绿线部分)
- 因为是更多天的平均值,所以曲线波动小,更加平坦。
- 曲线向右移动,因为需要平均的温度值更多
- 如果温度变化,适应温度会更慢一点,出现延迟,因为前一天权重太大(0.98),当天温度权重太小(0.02)
- 比如\(\beta=0.5\)时,是\(\frac{1}{1-0.5}=2\)天的平均值(上图黄线部分)。平均数据较少,所以曲线有更多的噪声,有可能出现异常值。
理解指数加权平均数
- 加和平均的过程:
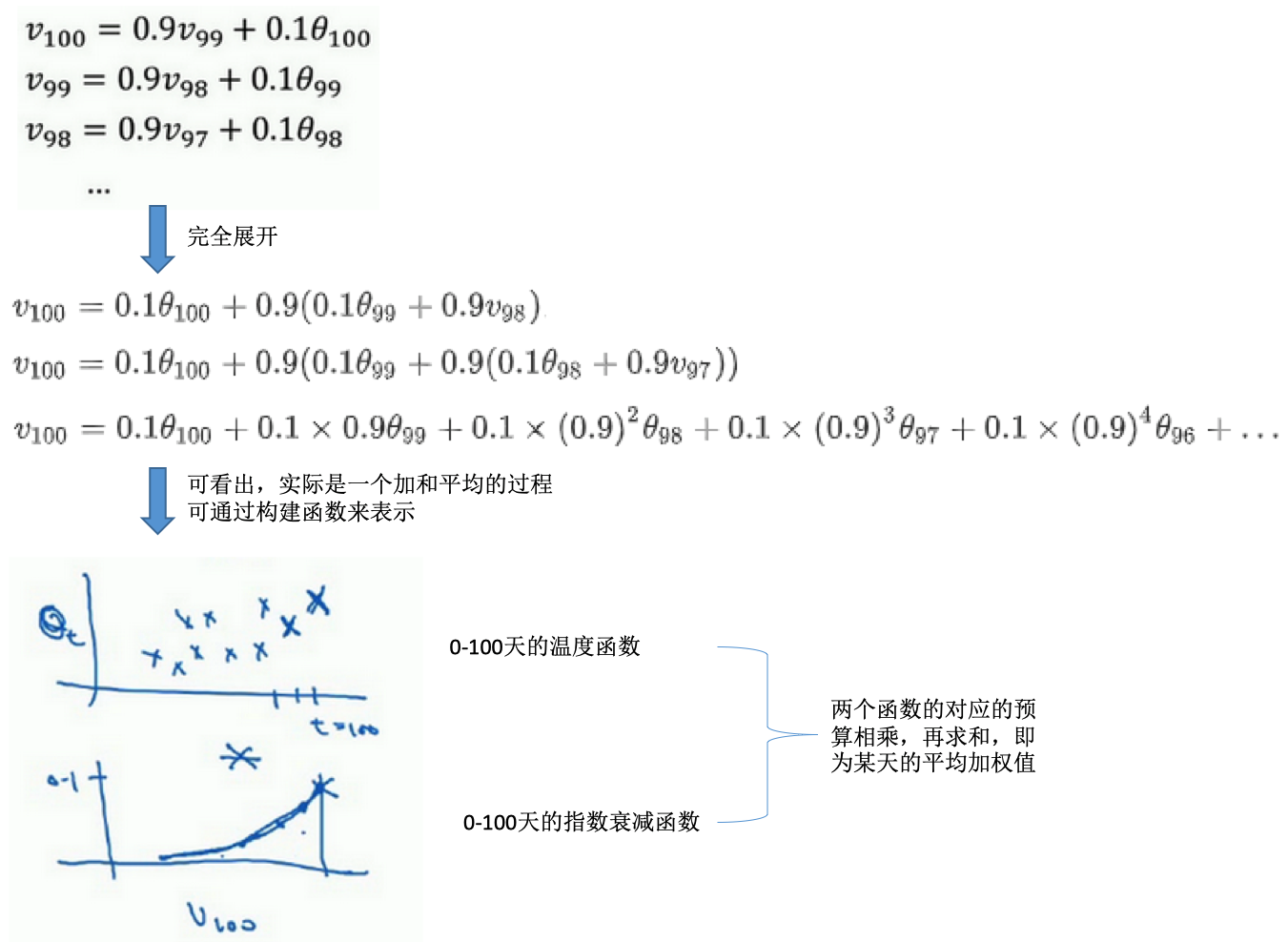
- 需要(表示)多少天的平均?
- 大概是\(\frac{1}{1-\beta}\)天的平均温度
- 如果\(\beta=0.9\)时,是\(\frac{1}{1-0.9}=10\)天的平均
- 此时,第10天0.9^10=0.35,约等于1/e(e是自然对数),也就是说10天后,曲线的高度下降到1/3,相当于峰值的1/e
- 实际计算:
- 一开始将\(V_0\)设置为0
- 再计算第一天\(v_1\),第二天\(v_2\)等。【所以第一天是等于\(1-\beta \theta\)温度值】
- 为什么指数加权平均?
- 占用极少内存
- 电脑中值占用一行数字,然后把最新的数据代入公式计算
- 一行代码
- 并不是最好或者最精确的计算平均数的方法
指数加权平均的偏差修正
- 偏差修正:让平均数的运算更加准确
- 修正策略:
- 主要是初期的估算不准确
- 在初期不直接使用Vt,而是除以了一个系数之后的值

- 所以当t比较大的时候,紫线和绿线会重合。偏差修正可以让在开始的阶段两者也能近似重合。
- 实际:不在乎执行偏差修正,宁愿熬过初始时期
动量梯度下降法
- 运行速度几乎总快于标准的梯度下降
- 基本思想:计算梯度的指数加权平均,利用这个梯度更新权重
- 例子:
- 横轴希望能快速下降
- 纵轴希望较小波动
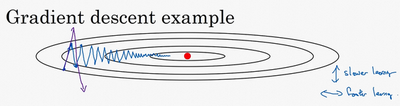
-
使用移动平均数,计算w和b的梯度,可减缓梯度下降的幅度
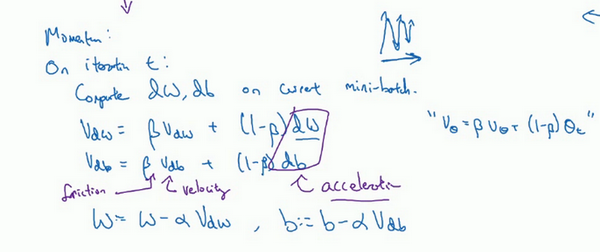
- 为什么这里梯度的移动平均是work的?
- 纵轴:导数上下晃动,但是摆动的平均值接近于0。所以取移动平均后,正负相互抵消,使得平均值接近于0。
- 横轴:所有的导数都是正方向的,所以平均后的值仍然很大。
- 最终:纵轴的摆动变小,横轴的运动更快,从而在抵达最小值的路上减小了摆动。
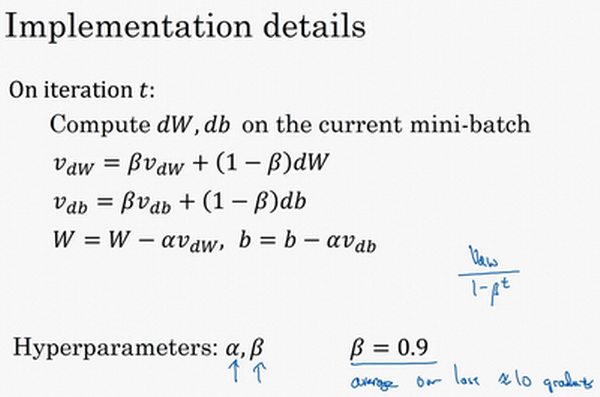
- 算法过程:
- 两参数:学习速率\(\alpha\)、参数\(\beta\)(控制着指数加权平均,常用值为0.9,相当于过去10此迭代的梯度的平均)
- 一般不会做偏差修正:10此迭代之后,移动平均已经过了初始阶段
RMSprop
- RMSprop:root mean square prop
- 加速梯度下降
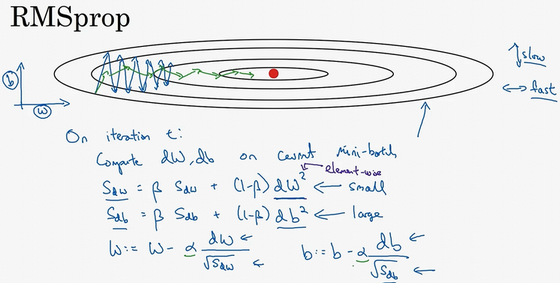
- 在某次迭代:
- 计算w、b的梯度
- 计算指数加权的值,w、b的微分平方的指数加权平均
- 使用梯度除以上面的指数加权,进行梯度更新(不像momentum,直接使用微分的指数加权进行更新)
- 为什么有效果?
- 目标:水平方向(w方向),想保持大的梯度下降;竖直方向(b方向),想减缓摆动
- 如何做到:引入一个系数,就是原来的梯度除以一个系数
- 原来:\(W := W - \alpha dW, b := b - \alpha db\)
- 现在:\(W := W - \alpha \frac{dW}{sqrt(S_{dW})}, b := b - \alpha \frac{db}{sqrt(S_{db})}\)
- 水平w方向:斜率较小,所以dW较小
- 竖直b方向:斜率较大,所以db较大
- 结果:纵轴更新被一个大的数相除,消除摆动;水平更新则被小的数相除。在图中就是由蓝色的线变为绿色的线,纵轴摆动小,横轴继续推进。【核心:消除有摆动的方向,所以更快】
Adam优化算法
- 结合Momentum和RMSprop
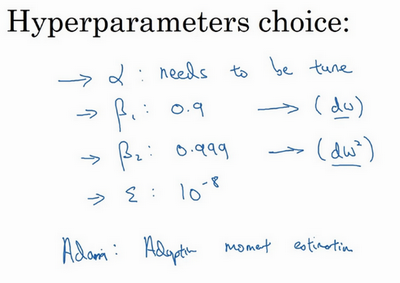
- Adam:adaptive moment estimation,Adam权威算法
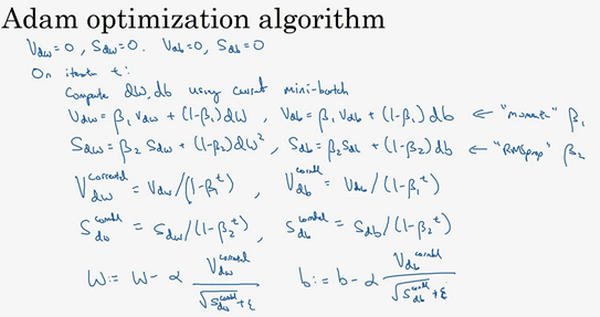
- 过程:
- 初始化
- 迭代时
- 先计算mini-batch的w、b的梯度
- 计算momentum指数加权平均,更新超参数\(\beta_1\)
- 计算RMSprop加权平均,更新超参数\(\beta_2\)
- 基于上述两者更新权重w和b
- 图解
- 超参数:
- 学习速率:\(\alpha\),需要调试
- dW的移动平均数:参数\(\beta_1\),momentum项,缺省值是0.9
- \((dW)^2,(db)^2\)的移动平均:参数\(\beta_2\),RMSprop项,推荐使用0.99
- 超参数\(epsilon\):选择没那么重要,建议是10^-8
学习速率衰减
- 随时间减少学习速率可加快学习算法
- 比较:
- 学习速率固定:蓝色线,整体会朝向最小值,但是不会精确收敛,因为mini-batch有噪声所以最后在最小值附近摆动
- 学习速率慢慢减小:绿色线,初期是学习速率较大,学习相对较快;随着学习速率的减小,会在最小值附近的一块区域摆动,而不是在训练中来回摆动。
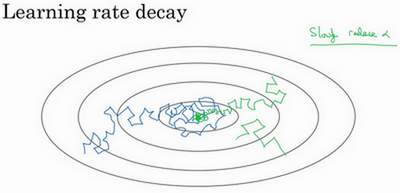
- 本质:学习初期,能承受较大的步伐;但当开始收敛的时候,小的学习速率能让步伐小一些。
- 如何设置:
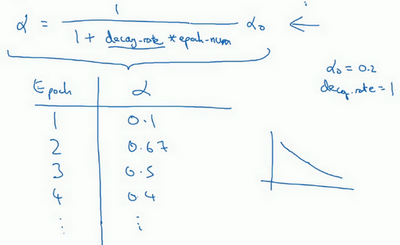
- 设置为依赖于epoch的:\(\alpha=\frac{1}{1+decay_rate \times epoch_num}\)
-
decay_rate:需调整的超参数
- 例子:decay_rate=1, \(\alpha_0=0.2\)
- 第一代(epoch1):\(\frac{1}{1+1*1}\alpha_0=0.1\)
- 第二代:0.67
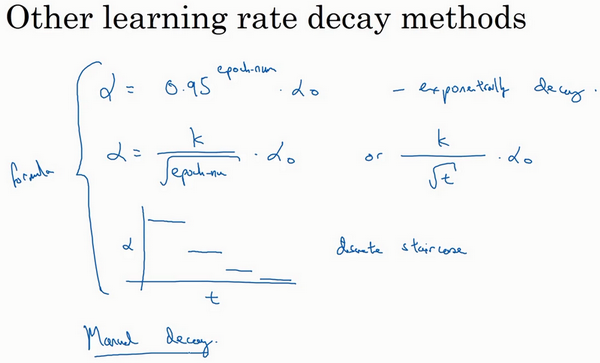
- 其他衰减函数:
- 指数衰减:epoch_num作为指数
- 离散下降:不同的阶段学习速率减小一半
- 手动衰减
局部最优问题
- 梯度为0通常不是局部最优,而是鞍点
- 高维空间概率局部最优概率很小:假设梯度为0,那么每个方向可能是凸函数,也可能是凹函数。要想是局部最优,需要每个方向都是凸函数,概率是2^(n),如果是高维空间,这个概率值很小。所以更可能碰到的是鞍点。
- 为什么叫鞍点?有一点导数为0.
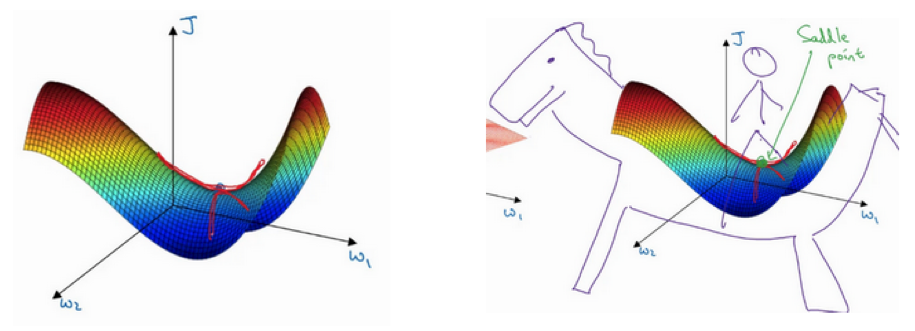
- 所以局部最优不是问题
- 平稳段学习减缓:
- 局部最优不是问题
- 平稳段导数长时间接近于0,曲面很平坦
- 学习十分缓慢,这也是Momentum、RMSprop、Adam能加速学习的地方
- 需要很长的时间才能走出平稳段
参考
- 第二周:优化算法
- Sebastian Ruder: An overview of gradient descent optimization algorithms 一个比较不同的梯度下降优化算法的文章
If you link this blog, please refer to this page, thanks!
Post link:https://tsinghua-gongjing.github.io/posts/improve-deep-neural-networks-2-optimization.html
Previous:
keras
Next:
【2-3】深度学习的超参数优化、batch归一化
Latest articles
Links
- ZhangLab , RISE database , THU life , THU info
- Data analysis: pandas , numpy , scipy
- ML/DL: sklearn , sklearn(中文) , pytorch
- Visualization: seaborn , matplotlib , gallery
- Github: me