目录
任务与奖赏
如何种西瓜?
- 选种
- 定期浇水、施肥等【执行某个操作】
- 一段时间才收获西瓜
-
收获后才知道种出的瓜好不好【好瓜是辛勤种植的奖赏】
- 执行操作后,不能立即获得最终奖赏
-
难以判断当前操作对最终操作的影响
- 强化学习:reinforcement learning
- 需要多次种瓜,在种瓜过程中不断摸索,然后才能总结出好的种瓜策略
-
这种过程的抽象
- 通常用马尔科夫决策过程描述:MDP(markov decision process)
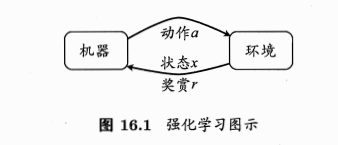
- 机器处于环境E中,状态空间为X,每个状态\(x\in X\)是机器感知到的环境的描述(如瓜苗的长势好不好的描述)
- 机器可采取的动作空间A:比如浇水、施肥
- 状态转移:某个动作a作用在当前状态x上,潜在的转移函数P使得环境从当前状态按照某种概率转移到另一个状态。如x=缺水,a=浇水,则瓜苗的长势发生变化,一定概率恢复健康,也一定概率无法恢复。
-
奖赏:在转移到另一个状态时,根据潜在的奖赏函数R反馈给机器一个奖赏,如健康+1,凋零-10
- 模型对应四元组:\(E=<X,A,P,R>\)
- \(P: X\times A\times X \longmapsto R\):状态转移概率
- \(R: X\times A\times X \longmapsto R\):奖赏
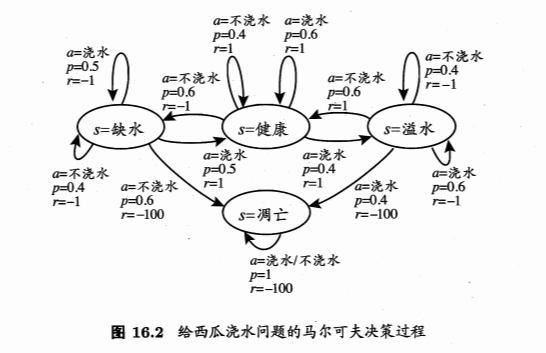
- 西瓜浇水的马尔科夫决策过程:
- 4个状态:健康、缺水、溢水、凋亡
- 2个动作:浇水、不浇水
- 状态保持健康+1;缺水/溢水-1;凋亡-100且无法恢复
- 机器 vs 环境:
- 环境中的状态转移、奖赏返回不受机器控制
- 机器可通过选择动作影响环境
- 策略:
- 机器的核心:学习策略
- 通过在环境中不断尝试而学得一个策略(policy) \(\pi\)
-
根据这个策略,在状态x下就能得知要执行的动作\(a=\pi(x)\)
- 策略表示方法:
- 【1】函数表示:\(\pi: X \longmapsto A\),确定性策略表示
-
【2】概率表示:\(\pi: X \times A \longmapsto R\),随机性策略表示,当前状态x下选择动作a的概率
- 策略好坏?
- 取决于长期执行这一策略后得到的累计奖赏
- 强化学习目的:找到能使长期累计奖赏最大化的策略
- 计算方式:
- T步累计奖赏
- \(\gamma\)折扣累计奖赏
- 强化学习 vs 监督学习:
- 状态 =》 样本
- 动作 =》 标记
- 策略 =》 分类器或者回归器
-
模型形式无差异
- 强化学习没有有标记样本,没有直接可以告诉机器在什么状态下采取什么动作。
- 只有等最终结果揭晓,才能通过”反思“之前的动作是否正确进行学习
- 某种意义:延迟标记信息的监督学习问题
K-摇臂赌博机
探索-利用窘境
最大化单步奖赏:
- 最终奖赏的简单情况
- 仅考虑一步操作
-
通过尝试发现各个动作产生的结果
- 需考虑2个方面:
- 每个动作的奖赏
- 执行奖赏最大的动作
- 注意:如果每个动作的奖赏是确定值,直接尝试,选最大的即可。通常一个动作的奖赏值来于一个概率分布,仅一次尝试不能确切获得平均奖赏值。
单步强化学习:
- 理论模型:K-摇臂赌博机
- 有K个摇臂,在投入一个硬币后可选择按下一个摇臂,每个摇臂以一定概率吐出硬币,但是这个概率赌徒是不知道的
-
赌徒目标:通过一定的策略最大化自己的奖赏
- 仅探索法:
- exploration-only
- 若仅为了获知每个摇臂的期望奖赏
- 所有的尝试机会平均分配给每个摇臂,各自的平均吐币概率作为奖赏概率的近似估计
- 很好的估计每个摇臂的奖赏
- 失去很多选择最优摇臂的机会
- 仅利用法:
- exploitation-only
- 若仅为了执行奖赏最大的动作
- 按下目前最优的摇臂(即目前为止平均奖赏最大的),若多个最优,随机选取一个
- 不能很好的估计每个摇臂的奖赏
- 两者都难以使最终的累计奖赏最大化
- 探索-利用窘境:
- 尝试次数有限
- 一方加强则另一方削弱
- 需在探索和利用之间达成较好的折中
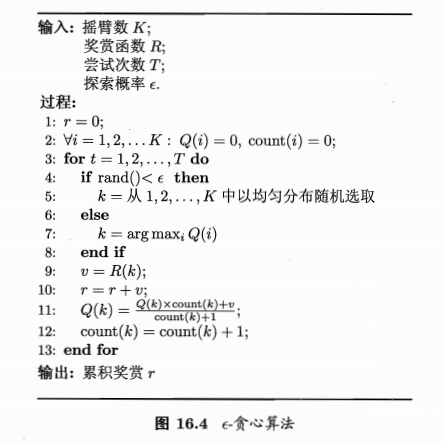
\(\epsilon\)-贪心
- 基于概率对探索和利用进行折中
- 每次尝试,以\(\epsilon\)概率进行探索,以均匀概率随机选取一个摇臂
- 以\(1-\epsilon\)概率进行利用,选择当前平均奖赏最高的摇臂
- 摇臂k的平均奖赏:\(Q(k)=\frac{1}{n}\sum_1^nV_i\),k此尝试的奖赏的均值
- 问题:对于每个臂的计算,都需要n个记录值,不够高效
- 做法:对均值进行增量式计算,每尝试一次就立即更新\(Q(k)\)
- n-1 =》 n:\(Q_nk=\frac{1}{n}{(n-1)\times Q_{n-1}(k)+v_n}=Q_{n-1}(k)+\frac{1}{n}(v_n - Q_{n-1}(k))\)
- 只需记录两个值:已尝试次数n-1; 最近平均奖赏 \(Q_{n-1}(k))\)
- 若概率分布较宽(不确定性大),需更多的探索,需较大的\(\epsilon\)
- 若概率分布较集中(不确定性小),需少的探索,需较小的\(\epsilon\)
- 通常:取较小的常熟,如0.1,0.01
- 如果尝试次数很大,可逐渐减小\(\epsilon\)值
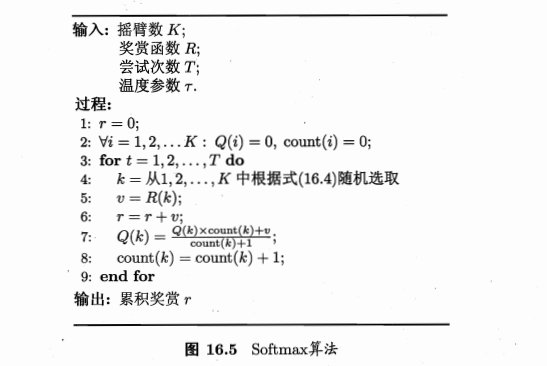
Softmax
- 基于当前已知的摇臂平均奖赏对探索和利用进行折中
- 若各摇臂平均奖赏相当,则选取概率也相当
- 若某些奖赏高于其他,则被选取概率也更高
- 摇臂概率分配基于玻尔兹曼分布:
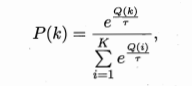
- \(Q(i)\):当前摇臂的平均奖赏
- \(\tau>0\):温度,越小则平均奖赏高的摇臂被选取的概率越高
- \(\tau\)趋于0:趋于仅利用
- \(\tau\)趋于无穷大:趋于仅探索
-
算法描述:
- Softmax vs \(\epsilon\)-贪心
- 好还取决于具体应用
- 例子:2-摇臂机,臂1返回奖赏1概率是0.4,返回0概率是0.6;臂2返回奖赏1概率是0.2,返回0概率是0.8
- 平均累计奖赏如下:
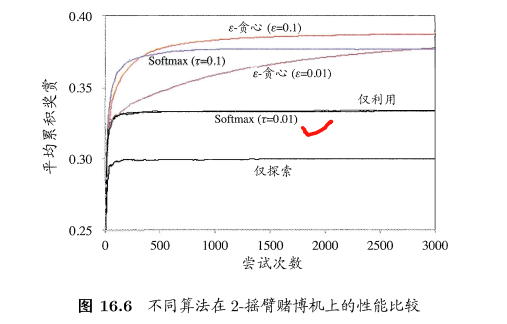
- 不同的参数条件下不一样
有模型学习
- 上面的是单步强化学习
- 实际:多步强化学习
- 模型已知:假设任务对应的马尔科夫决策过程四元组已知(即机器对环境进行了建模,能在机器内部模拟出与环境相同或近似的状况)
- 状态x执行动作a到状态x‘的转移概率、对应的奖赏已知
策略评估
- 模型已知,能评估任意策略的期望累计奖赏
- 状态值函数:state value function,\(V^\pi(x)\),从状态x出发,使用策略\(pi\)带来的累计奖赏【指定状态】
- 状态-动作值函数:state-action value function,\(Q^\pi(x,a)\):从状态x出发,执行动作a后,再使用策略\(pi\)带来的累计奖赏【指定状态-动作】
- 马尔科夫性质计算值函数:
- 马尔科夫性质
- 递归(动态规划)

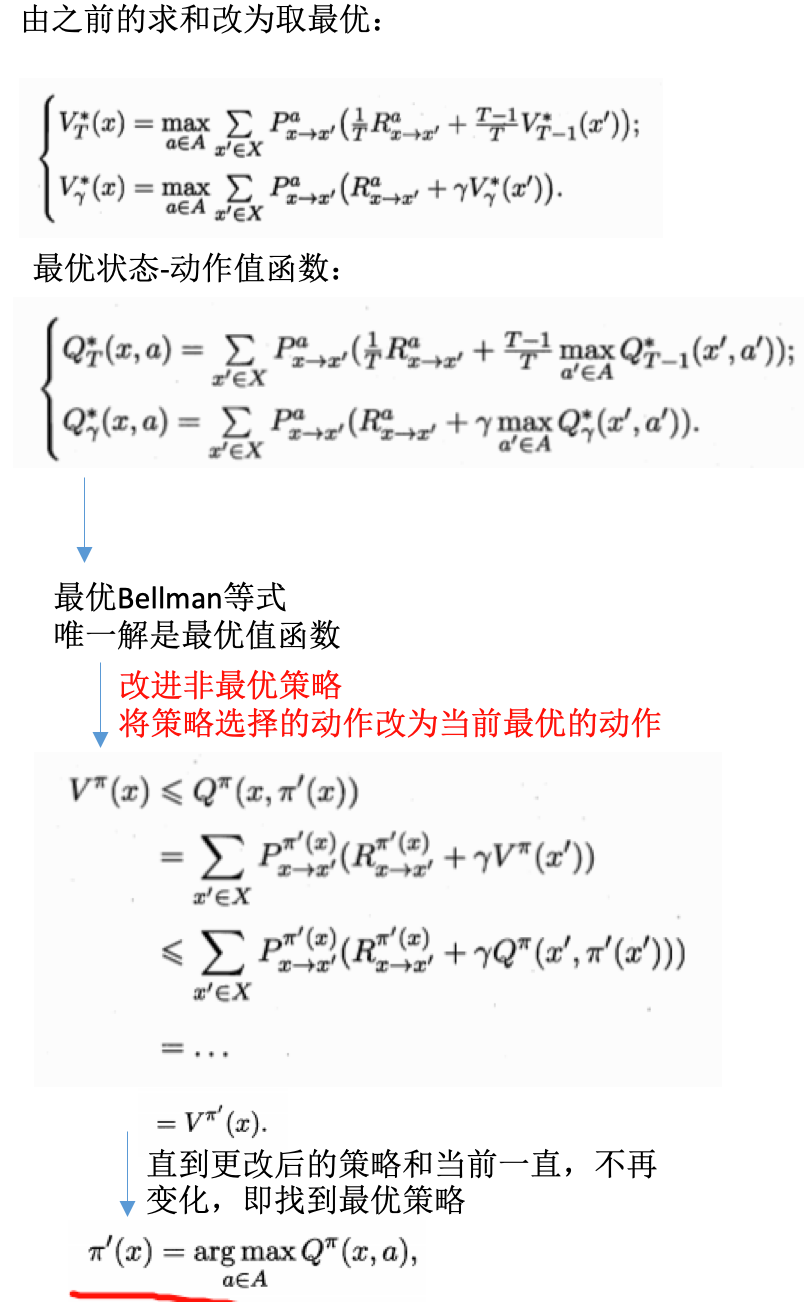
策略改进
- 策略进行累计奖赏评估后,发现不是最优策略,希望改进
- 理想的策略应该是能够最大化累计奖赏的:\(\pi^* = arg max \sum_{x \in X}V^{\pi}(x)\)
- 一个强化学习可能有多个最优策略,最优值函数
策略迭代与值迭代
- 前面:如何评估一个策略的值函数+评估策略后改进
- 策略迭代:policy iteration,结合以找到最优解
- 从一个初始策略出发
- 先进行策略评估,然后改进策略
- 评估改进的策略,再进一步改进策略
- 。。。
- 不断迭代评估和改进
- 直到策略收敛、不再改变
- 基于T步累计奖赏的策略迭代:
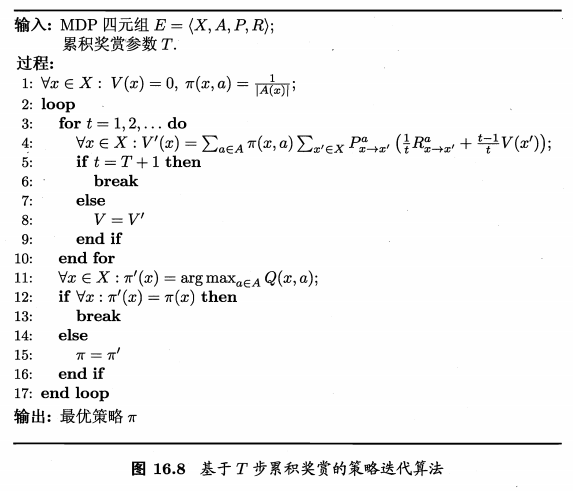
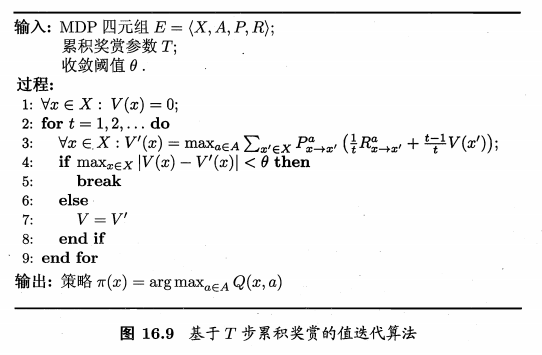
- 基于T步累计奖赏的值迭代:
- value iteration
- 策略迭代需每次改进策略后重新进行评估
- 比较耗时
- 策略改进与值函数的改进是一致的
- 可将策略改进视为值函数的改善
- 模型已知:
- 强化学习 =》 基于动态规划的寻优问题
- 与监督学习不太,不涉及泛化能力,而是为每一个状态找到最好的动作
免模型学习
- 现实:环境的转移概率、奖赏函数难以得知
- 免模型学习:
- model-free learning
- 学习算法不依赖于环境建模
- 比有模型学习困难得到
蒙特卡罗强化学习
- 策略迭代问题:如何品谷策略?模型未知不能做全概率展开
- 通过在环境中执行动作,以观察专一的状态和得到的奖赏
- 策略评估替代方案:多次采样,求平均
- 蒙特卡罗强化学习
- 策略迭代算法:估计状态值函数V
- 由V退出状态-动作值函数Q
- 模型已知时,容易
- 未知时困难
- 估计对象从V转变为Q:估计状态-动作值函数
- 评估过程:
- 从起始状态出发,使用某种策略进行采样
- 执行该策略T步获得轨迹:\(<x_0,a_0,r_q,...,x_{T-1},a_{T-1},r_{T-1}>\)
- 对轨迹中出现的每一对状态-动作,记录奖赏之和,作为其一次采样
- 多次采样获得多个轨迹
-
每个状态-动作的累计奖赏采样值求和取平均,得到状态-动作值函数的估计
- 策略是确定性的,对策略进行采样,可能得到的是多个相同的轨迹
- 而我们需要不同的采样轨迹
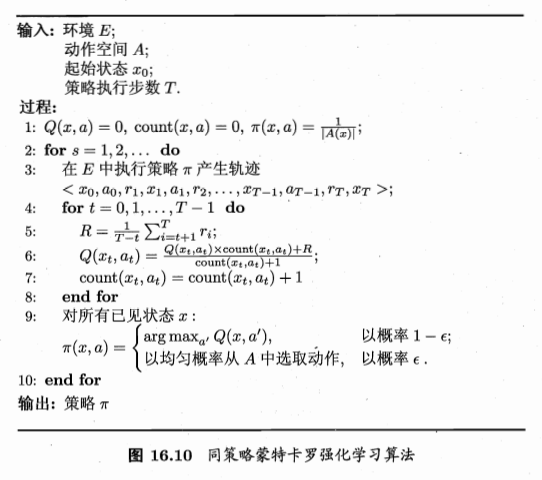
- 可使用\(\epsilon\)贪心法
- 以\(\epsilon\)的概率从所有动作中随机选取一个,以\(1-\epsilon\)的概率选取当前最优动作
- 这样多次采样会产生不同的采样轨迹
- 策略改进:
- 可以以同样的策略进行改进
- 因为引入的贪心策略是均匀分配给所有动作的
- 同策略蒙特卡罗强化学习:
- on-policy
- 被评估和改进的是同一个策略
- 异策略蒙特卡罗强化学习:
- off-policy

- off-policy
时序差分学习
- 蒙特卡罗:
- 考虑采样轨迹,克服模型未知给策略评估造成的困难
- 完成采样轨迹后进行评估,效率低下
- 没有充分利用强化学习任务的MDP结构
- 时序差分:
- temporal difference
- 结合动态规划和蒙特卡罗的思想
- 更高效的免模型学习
- 蒙特卡罗:求平均是批处理式的
- 增量式进行:
- 从t时刻到t+1时刻的增量

- 从t时刻到t+1时刻的增量
- 每执行一步策略就更新一次值函数估计
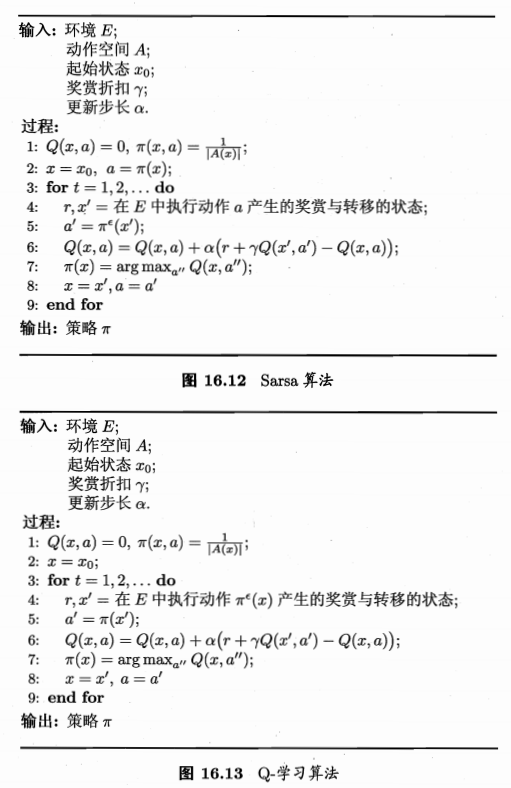
- Sarsa算法:
- 同策略算法
- 评估\(\epsilon\)-贪心策略
- 执行\(\epsilon\)-贪心策略
- 更新需知道:State前一步状态, Action前一步动作, Reward奖赏值, State当前状态, Action将执行动作【这也是使用了马尔科夫的性质的体现】
- Q-学习算法:
- 异策略算法
- 评估\(\epsilon\)-贪心策略
- 执行原始策略
值函数近似
- 强化学习:
- 有限空间状态,每个状态可用一个编号指代
- 值函数:关于有限状态的表格值函数,数组表示,i对应的函数值就是数组i的值
- 状态空间是连续的?无穷多个状态?
- 状态空间离散化:转换为有限空间后求解
-
转换:是难题
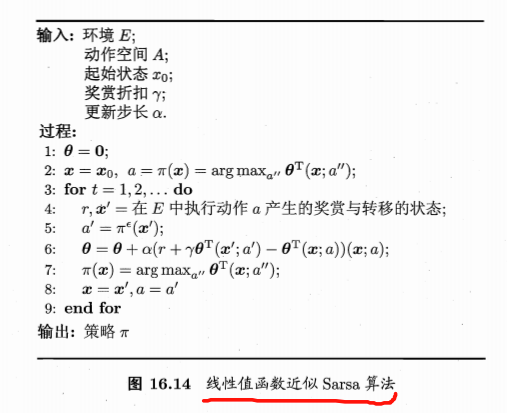
- 直接对连续状态空间进行学习
- 简化情形:值函数为状态的线性函数:\(V_{\theta}(x)=\theta^Tx\)
- x:状态向量,\(\theta\):参数向量
- 此时的值函数难以像有限状态那样精确记录,这种求解是值函数近似(value function approximation)
- 线性值函数近似:
模仿学习
- 模仿学习:
- imitation learning
- 现实任务中,往往能得到人类专家的决策过程范例,从这样的范例中学习,就是模仿学习
直接模仿学习
- 多步决策搜索空间巨大
-
缓解:直接模仿人类专家的“状态-动作对”
- 人类专家轨迹数据集:\(\{\tau_1,\tau_2,...,\tau_m\}\)
- 每条轨迹包含状态+动作:\(\tau_i=<s_1^i,a_1^i,...,s_{n_i+1}^i>\), \(n_i\):第i条轨迹的转移次数
- 数据 =》在什么状态下选择什么动作,可利用监督学习
- 抽取“状态-动作”对:
- 新数据集:\(D=\{(s_1,a_1),(s2,a_2),...\}\)
- 特征:状态
- 标记:动作
- 使用分类或回归算法学得策略模型
逆强化学习
- 现实任务:设计奖赏函数很困难
- 逆强化学习:
- 从人类专家提供的范例数据中反推奖赏函数有助于解决该问题
- inverse reinforcement learning
- 基本思想:
- 使机器做出与范例一致的行为,等价于在某个奖赏函数的环境下寻求最优策略,该策略所产生的轨迹与范例数据一致。
- 寻找某种奖赏函数使得范例数据最优,然后使用这个奖赏函数来训练强化学习策略
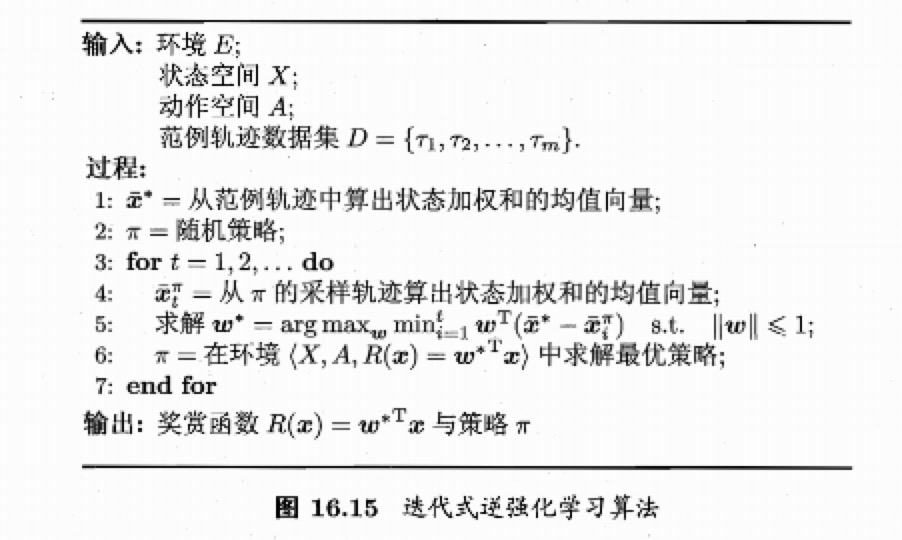
- 算法:
- 从随机策略开始
- 迭代求解更好的奖赏函数
- 基于奖赏函数获得更好的策略
- 直到最终获得最符合范例轨迹数据集的奖赏函数和策略
参考
- 机器学习周志华第16章
If you link this blog, please refer to this page, thanks!
Post link:https://tsinghua-gongjing.github.io/posts/reinforcement-learning.html
Previous:
【1-1】深度学习引言
Next:
【1-2】神经网络的编程基础
Latest articles
Links
- ZhangLab , RISE database , THU life , THU info
- Data analysis: pandas , numpy , scipy
- ML/DL: sklearn , sklearn(中文) , pytorch
- Visualization: seaborn , matplotlib , gallery
- Github: me