【5-1】循环序列模型
2019-03-11
目录
- 目录
- 为什么选择序列模型?
- 数学符号
- RNN模型
- 通过时间的反向传播
- 不同类型的RNN
- 语言模型和序列生成
- 对新序列采样
- RNN中的梯度消失
- GRU门控循环单元
- LSTM长短期记忆
- 双向神经网络
- 深层RNN
- 参考
为什么选择序列模型?
- 在语音识别、自然语言处理等领域引起变革
- 例子:
- 语音识别:输入音频片段,输出文字
- 音乐生成:输入空集、数字等,输出序列
- 情感分类:输入语句,输出对应的评价等级
- DNA序列:输入DNA序列,输出匹配的蛋白质
- 机器翻译:输入一种语言,输出另一种语言
- 视频行为:输入视频祯,输出识别出的行为
- 名字识别:输入语句,输出不同实体的名称

- 注意:
- 问题归纳:都是使用标签数据(X,Y)作为训练集的监督学习
- 输入和输出不一定都是序列
- 输入和输出的长度不一定相等
数学符号
- 都是序列模型,以输入是序列为例看怎么表示数据
- 例子:
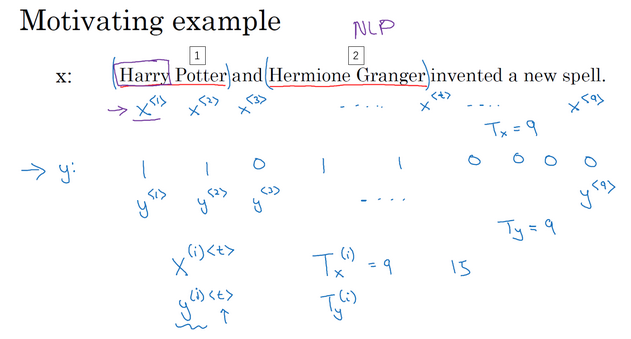
- 命名实体识别问题
- 查找不同类型的文本中的人名、公司名、时间、地点、国家名和货币名等
- 输入数据:\(x^{<t>}:x^{<1>},x^{<2>}...\)如此表示顺序索引的单词
- t表示索引序列的位置,不管输入是不是时序序列,均可这样表示
- 输入序列长度:\(T_x\)
- 输出数据:\(y^{<t>}:y^{<1>},y^{<2>}...\)
- 输出序列长度:\(T_y\)
- 加入样本信息:\(x^{(i)<t>}\),训练样本i的序列中的第t个元素
- 序列长度:\(T_y^{(i)}\),第i个样本的输出序列的长度
- 单词表示:
- 词典表示法
- 每个单词使用所选词典的one-hot表示,此词所在index为1,其他index为0
- 所以如果选用的词典是10000,那么对于一个序列长度为9的句子,其表示就是:9个长度为10000的向量
- 遇到不在词典中的单词,可创建新的标记叫做Unknown Word的伪造单词,
作为标记 [](https://raw.githubusercontent.com/Tsinghua-gongjing/blog_codes/master/images/20191010144812.png)
RNN模型
- 为什么不使用标准神经网络模型?
- 对于序列问题,为什么不使用标准的神经网络模型,一层层的计算?
- 问题1:不同的样本其长度不一定是相同的。不是所有的例子都有着相同的输入长度或者输出长度。标准网络的表达方式不太好。
- 问题2:从不同位置学到的特征不能共享。比如从某个例子中学到位置1出现的词是人名,那么这个词出现在其他的位置,应该也能学到其是人名。
- 问题3:参数巨大。比如词向量进行one-hot编码,如果词典大小是10000,那么每个词的表示就是这么大,一个10个单词的句子就是10x10000大小。全连接下的参数会非常巨大。

- RNN:
- 每一个时间步,RNN网络传递一个激活值到下一个时间步用于计算
- 零时刻:构造一个激活值,通常是零向量
- 每个时间步的参数是共享的

- 单向RNN:只用了序列中之前的信息做出预测
- 双向RNN:可以用到前后的序列信息做出预测
- 例子:上面的语句中,如果只根据前面的单词信息,不知道 Teddy 究竟是什么,但是使用前后的信息后,就知道这是不是个人名了。
- RNN前向传播计算:
- 根据每个时间点的输入,前一个时间点的激活值,来计算当前时间点的激活值和预测值
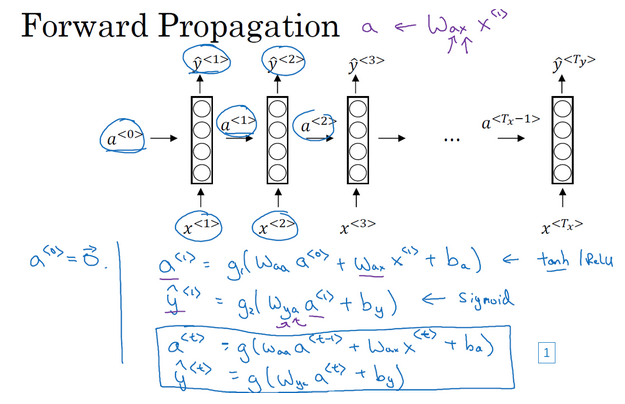
- RNN中常用的激活函数是tanh
- 计算的简化表示:对于前一时间点的激活值要乘以一个参数,当前时间点的输入也要乘以一下参数,所以可以把这部分进行合并表示(就是下图中的编号1可表示为编号2,编号345是拆开了说为什么是相等的)

- 根据每个时间点的输入,前一个时间点的激活值,来计算当前时间点的激活值和预测值
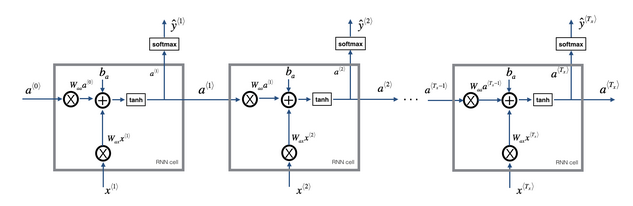
- 前向传播示意图:
- 这里是对每个cell展开了具体的计算流程示意图
- 先计算激活值,再根据激活值计算预测值。时间t时刻的预测值是依赖于激活值的计算的。
通过时间的反向传播
- 因为这里的网络是按照时间进行传递的,所以反向传播相当于时间回溯了
- 下图中蓝色的流就代表前向传播,红色的流代表反向传播

- 例子:计算a1,y1
- 输入:x1
- 前一刻的激活值:a0
- 计算a1还需要:Wa和ba,因为a1=g(Wa * [a0, x1] + ba),这里的Wa和ba在之后的每一个时间步也是需要用到的,所以是需要学习的参数
- 计算y1还需要:Wy和by,因为y1=g(Wy * a1 + by),这里的Wy和by在之后的每一个时间步也是需要用到的,所以是需要学习的参数
- 损失函数:
- 逻辑回归损失函数(交叉熵损失函数)
- 整个序列的损失:每一个时间步上的损失的和
- 反向传播示意图:
- 总损失下使用梯度更新参数

- 总损失下使用梯度更新参数
不同类型的RNN

- 一对一:标准的小型神经网络,输入x输出y
- 一对多:一个输入,多个输出
- 音乐生成。输入只有一个,比如音乐类型等,甚至是空的输入,但是需要输出一连串的音符
- 多对一:很多的输入,最后一个时间上输出
- 情感分析。输入的是一个序列(句子),最后给出一个评价等
- 多对多:输入是一个序列,输出也是一个序列
- 输出和输入长度相等。比如实体名称标注。
- 输出和输入长度不相等。比如机器翻译,从一个语言翻译到另一个语言,所用的词语长度不一定是一样的。
语言模型和序列生成
- 语言模型:
- 语音识别系统:计算每句话出现的可能性
- 告诉某个特定的句子出现的概率

- 如何构建语言模型?
- 训练集:很大的英文文本语料库(corpus)
- 语料库:自然语言处理的专有名词,指很长的或者说数量众多的英文句子组成的文本
- 句子标记化:根据词字典(比如10000个词),把句子中的每个单词转化成one-hot向量
- 定义句子结尾:增加额外的标记EOS
- 标点符号:自行决定是否看成标记
- 词不在词典中:用UNK进行替换,表示未知词
- 完成:输入的句子都映射到字典中的各个词上了

- 构建RNN模型得到这些序列的概率
- 时间t=0:输入x1和a0计算激活项a1,通常a0取0向量,x1也设为全为0的集合。此时是通过softmax预测第一个词是什么(就是y1),具体就是预测任意词为第一个词的概率,比如a,the,dog等各个词的概率。
- 时间t=1:计算第二个词(y2)是什么。有激活项a1,x1是什么?此时的x1是上一个时刻的输出y1,即x2=y1,那么久可以计算激活项a2,然后计算y2。此时预测y2是各个词的概率,只是此时的概率是个条件概率,就是说前面已经是某个词的情况下,此时预测的词是什么。
- 依次类推,把上一个时刻预测的输出作为下一个时刻的输入,再预测当前时刻的输出。每一步都会考虑前面得到的单词。
- 直到到达序列结尾

- 代价函数:
- softmax损失:预测值和真实值之间的差异
- 总体损失:单个预测的损失函数相加起来
对新序列采样
- 如何知道模型学到了什么?新序列采样的方式进行评估
- 采样:
- 第一个词。模型已经知道了第一位置出现的各个词的概率,那么可以根据这个向量的概率分布进行采样。
- 把采样得到的第一个词作为下一个时间的输入,然后预测得到y2
- 再把y2作为下一个时间的输入,以此类推
- 最后就可以得到一个完整的句子
- 基于词汇的RNN模型(字典中的词是英语单词)

- 基于字符的RNN模型
- 字典:字母、大小写的、数字
- 训练数据:单独的字符而不是词汇
- 优点:不必担心会出现未知的标识
- 缺点:会得到太多太长的序列,计算成本昂贵

- 绝大部分使用的是基于词汇的语言模型
- 基于字符的语言模型
- 左边:新闻文章训练出来的
- 右边:莎士比亚的文章训练出来的

RNN中的梯度消失
- 基本的RNN一个很大的问题:梯度消失
- 训练的时候后面的loss更新对前面的层没有影响
- 如果RNN处理一个1000时间序列长度的数据,那么就相当于是一个1000层的网络,容易出现梯度消失。
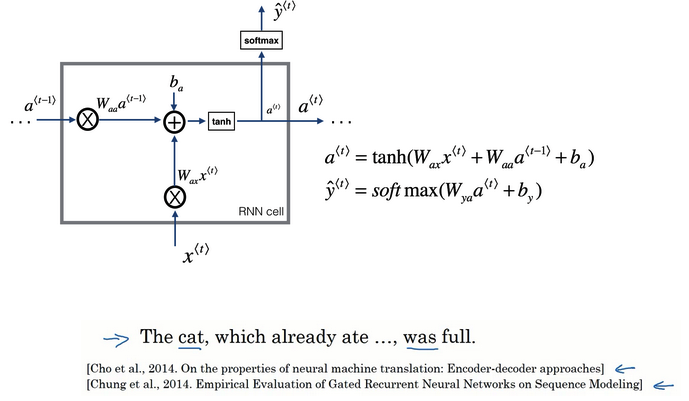
- 例子:
- ”The cat, which already ate,…, was full“
- “The cats, which ate, were full”
- 句子前后有长期依赖,就是前面的单词对后面的单词有影响,但是基本的RNN不善于捕捉长期依赖效应

- 标准网络:从输出y得到的梯度很难传播回去,很难影响靠前层的权重,从而影响到前面的层(上图编号4)
- 基本的RNN有很多局部影响
- 比如上图中的输出y3主要受其附近的值的影响
- 不擅长处理长期依赖的问题
- 梯度爆炸:
- 在反向传播中,随着层数的增多,梯度不仅可能指数型下降,也可能指数型上升
- 梯度爆炸:很容易发现,因为参数会大到崩溃,看到很多NaN或者不是数字情况(网络计算出现了数值溢出)
- 解决:梯度修剪。最大值修剪,观察梯度向量,如果大于某个阈值,就缩放梯度向量。是比较鲁棒的方法。
GRU门控循环单元
- GRU:
- gated recurrent unit,门控循环单元
- 改变了RNN的隐藏层
- 更好的捕捉深层连接
- 改善了梯度消失的问题
- RNN单元可视化回顾:
- 根据a(t-1)和x(t)的线性加和,输入到一个激活函数(这里是tanh)计算a(t)
- 把a(t)丢到softmax进行预测
- GRU简化版:
- 新变量c:记忆细胞
- 时间t处的记忆细胞值等于此时的激活值:c(t)=a(t)。在这里是一样的,在后面的LSTM可以看到是不一样的。
- 记忆细胞的候选值:使用激活函数计算,输入是上一时间的记忆细胞c(t-1)和此时的输入x(t)。计算公式类似于计算a(t),但是具体的权重参数不同。
- 门:更新门,关乎着是否要对记忆细胞的值进行更新。其计算的输入是:上一时间的记忆细胞c(t-1)和此时的输入x(t),但是采用的是sigmoid激活函数。因为sigmoid函数值范围在【0,1】之间,这个跟后面的判断更新有关。
- 是否更新?表达式:门 * 记忆细胞候选值 + 门反面 * 记忆细胞旧值

- 【步骤1】根据上一时刻的记忆细胞和输入x计算记忆细胞的候选值
- 【步骤2】根据上一时刻的记忆细胞和输入x计算更新门
- 【步骤3】根据门确定是否更新旧的细胞记忆值,得到激活值或者此时的记忆值
- 如果更新门=0(不更新):激活值=旧值保留
-
如果更新门=1(更新):激活值=候选值,丢掉旧值
- 门用的是sigmoid激活函数,如果其自变量值是很大的负数,那么激活后近似于0.此时,c(t)=c(t-1),非常有利于维持细胞的值,即使经过很多的时间步,能很好的维持。且此时更新门的值很小很小,所以不会有梯度消失的问题。这就是缓解梯度消失的关键!!!
- GRU完整版:
- 更改:在计算记忆细胞的新候选值加上一个新的项
- 相关门r:相关性,告诉候选值和旧值有多大的相关性
- r计算:根据上一时刻的记忆细胞和输入x计算,公式类似于计算更新门,只是具体的权重参数不一样

LSTM长短期记忆
- LSTM:
- long short term memory,长短期记忆
- 比GRU更加高效
- LSTM vs GRU:
- 增加了遗忘门。遗忘门和更新门共同决定记忆细胞值,GRU中只有更新门。
-
增加了输出门:因为此时记忆细胞的值不再直接等于激活值,所以需要有一个输出门

- GRU:更加简单,容易创建更大的网络,计算性能更快,易于扩展到大型网络
- LSTM:更强大灵活,因为具有三个门,使用的更多(虽然出现的更早)
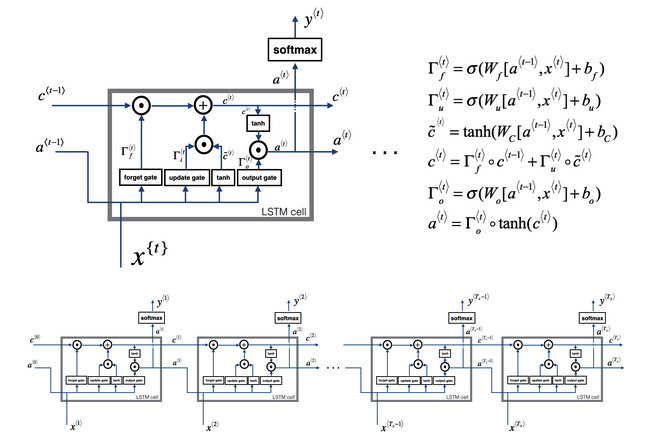
- LSTM计算:
- 【步骤1】根据上一时刻的激活值和输入x计算记忆细胞的候选值
- 【步骤2】根据上一时刻的激活值和输入x计算更新门
- 【步骤3】根据上一时刻的激活值和输入x计算遗忘门
- 【步骤4】根据上一时刻的激活值和输入x计算输出门
- 【步骤5】记忆细胞值 = 更新门 * 候选值 + 遗忘门 * 旧值,计算记忆细胞值
- 【步骤6】激活值 = 输出门 * 记忆细胞值,计算激活值
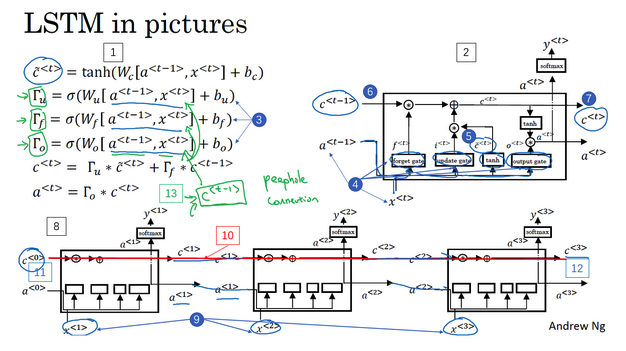
- LSTM前向传播:
- 注意看一下计算的先后顺序和细节
- 前一个激活值是会影响记忆值的计算
- 最后计算的记忆值又会影响输出的激活值
双向神经网络
- 双向RNN:在序列的某点不仅获取之前的信息,也获取未来的信息
- 单向RNN例子:
- 预测只能使用之前的信息
- 但是有时候只有根据后面的信息才能做出准确的判断
- 不管使用基本的RNN单元,还是GRU或者LSTM都是一样的
- 比如下例子中只根据前面的单词是不知道Teddy的名称属性的

- 双向RNN:
- 前向传播:包括两部分的计算,一部分是从左到右的,一部分是从右向左的
- 不仅使用之前的信息,还使用之后的信息。这里的使用就是要传播,比如使用之后的信息,就是后面的输入通过网络要传到前面的结点

- 例子:还是上面的Teddy,网络先从最开始的单词,顺序计算激活值(从左向右),计算完了之后,又从右向左计算,那么后面的值的信息也就传到前面去了。
- 基本单元也可以是GRU或者LSTM
深层RNN
- 通常网络:很多层
- 深层RNN:把多个RNN堆叠起来
- 深层网络比较:
- 左边:标准网络
- 右边:RNN,原来的激活值是a(0),a(1)这种表示的,就直接是第几层的激活值。在RNN里面,稍作修改,因为还有时间的信息,a(0)(1)这种,表示第几层网络的第几个时间点的激活值。

-
例子:a(2)(3)的激活值,两个输入,同一层的上一个时间点,上一层的同一个时间点的激活值
- 每一层网络均有自己的权重值,训练学习得到
- 通常三层就已经很多了
- 可以是GRU或者LSTM单元
参考
Read full-text »
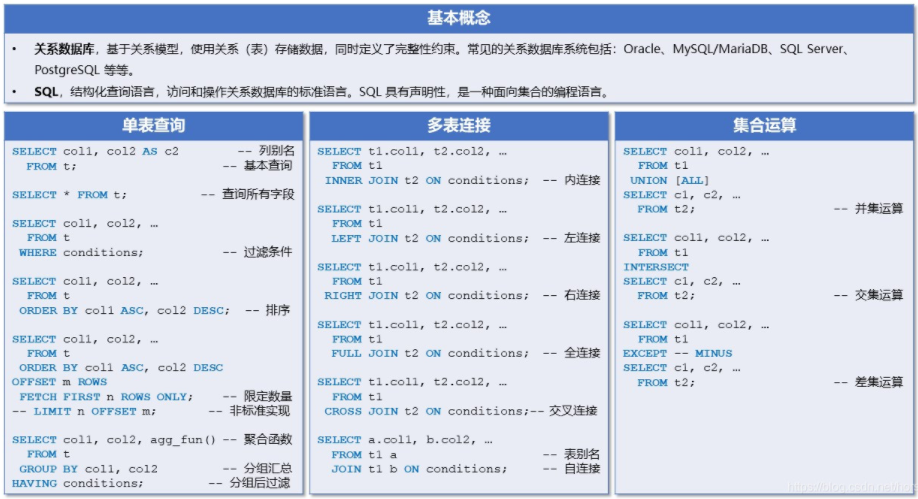
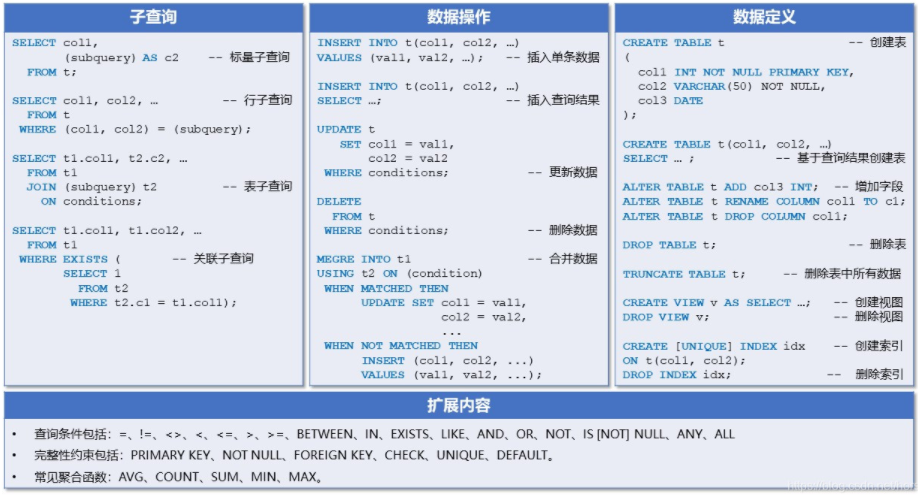
SQL速查表
2019-03-11
参考:SQL 速查表.pdf
Read full-text »
Connect remote jupyter server
2019-03-10
连接使用远程(集群)jupyter notebook
主要是参考了这里,这个是用的ipython,当时jupyter notebook还没完善,基本原理和操作是一样的,包括现在很多人使用的jupyter-lab,下面是连接jupyter-lab的例子:
1、在客户端打开一个指定端口的server:
jupyter-lab --port 8007
[W 13:37:55.064 LabApp] WARNING: The notebook server is listening on all IP addresses and not using encryption. This is not recommended.
[I 13:37:55.378 LabApp] JupyterLab beta preview extension loaded from /Share/home/zhangqf5/anaconda2/lib/python2.7/site-packages/jupyterlab
[I 13:37:55.378 LabApp] JupyterLab application directory is /Share/home/zhangqf5/anaconda2/share/jupyter/lab
[I 13:37:55.389 LabApp] Serving notebooks from local directory: /Share/home/zhangqf5/gongjing/rare_cell
[I 13:37:55.389 LabApp] 0 active kernels
[I 13:37:55.389 LabApp] The Jupyter Notebook is running at:
[I 13:37:55.389 LabApp] http://[all ip addresses on your system]:8007/?token=442494e19571582585464518668825f6ae1e4d4c3bdfc070
[I 13:37:55.389 LabApp] Use Control-C to stop this server and shut down all kernels (twice to skip confirmation).
[C 13:37:55.391 LabApp]
Copy/paste this URL into your browser when you connect for the first time,
to login with a token:
http://localhost:8007/?token=442494e19571582585464518668825f6ae1e4d4c3bdfc070
[I 13:42:16.820 LabApp] 302 GET / (::1) 0.47ms
[W 13:42:18.565 LabApp] Could not determine jupyterlab build status without nodejs
2、在本地使用ssh用指定端口登录:
ssh -Y username@remoteIP -L 8007:localhost:8007
3、在本地浏览器输入对应的地址:http://localhost:8007,有的时候需要指定一个token,所以可以直接复制完整第地址,比如这里的:
http://localhost:8007/?token=442494e19571582585464518668825f6ae1e4d4c3bdfc070
端口映射查看训练过程
主要是参考利用多重映射从本地查看集群的tensorboard,这里使用的是TensorBoardx:

- 其中实线是smooth过后的值,背后的shaddow是原始的值,可以把鼠标放在上面,查看每个epoch上的loss值。
- 这里是定义了几个不太的loss值,所以有不同的变量曲线。
- 写的步骤:1)定义writer;2)每个epoch获取loss值;3)将loss值添加到变量
writer = SummaryWriter()
min_loss,min_epoch,min_prediction = 100,0,0
for epoch in range(1, args.epochs + 1):
train_loss = train_LSTM(args, model, device, train_loader, optimizer, epoch, sequence_length, input_size)
validate_loss,prediction_all = validate_LSTM(args, model, device, validate_loader, sequence_length, input_size)
if validate_loss['train_nonull_validate_nonull'] < min_loss:
min_loss = validate_loss['train_nonull_validate_nonull']
min_epoch = epoch
min_prediction = prediction_all
with open(save_prediction, 'w') as SAVEFN:
print("Write prediction: epoch:{}, loss:{}".format(min_epoch, min_loss))
for i in min_prediction:
SAVEFN.write(','.join(map(str,i))+'\n')
best_model = copy.deepcopy(model)
writer.add_scalar('Train/loss', train_loss, epoch)
writer.add_scalar('Validation/train_nonull_validate_nonull',
validate_loss['train_nonull_validate_nonull']*args.batch_size, epoch)
writer.add_scalar('Validation/train_hasnull_validate_nonull',
validate_loss['train_hasnull_validate_nonull']*args.batch_size, epoch)
writer.add_scalar('Validation/train_hasnull_validate_hasnull',
validate_loss['train_hasnull_validate_hasnull']*args.batch_size, epoch)
writer.add_scalar('Validation/train_hasnull_validate_onlynull',
validate_loss['train_hasnull_validate_onlynull']*args.batch_size, epoch)
writer.close()
Read full-text »
【4-4】特殊应用:人脸识别和神经风格转换
2019-03-07
目录
什么是人脸识别?
- 工作刷脸通过:人脸识别+活体检测
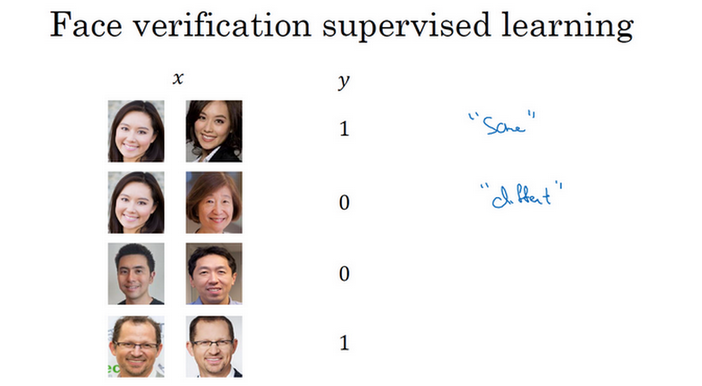
- 人脸验证:
- face verification
- 输入:一张图片,某个ID或者名字
- 输出:输入图片是否是这个人
- 做法:1对1问题,弄明白这个人是否和他声称的身份相符
- 人脸识别:
- face recognition
- 输入:一张图片
- 输出:这个图片是否是某数据库中的哪个人
- 做法:1对多问题
- 正确率需要很高才能取得好的效果

One-Shot学习
- 人脸识别挑战:
- 一次学习问题
- 需要通过单单一张图片或者一个人脸样例就能去识别这个人
- 例子:比如左边的是数据库的4个样本,对于新的人脸,如右侧的样本1、2,需要识别出1是数据库中的一个人,而2不是数据库中的某个人

- 解法1:卷积神经网络【不推荐】
- 比如数据库4个人,可以训练CNN,输出是4种
- 效果不会好
- 训练数据集太小,不能得到稳健的模型
- 不方便:加入新加入成员,需要重新训练模型,因为此时CNN的输出是5种
- 解法2:学习相似性函数
- 同样使用神经网络,但是学习目标发生变化
- 学习相似性函数d:评估图片之间的差异大小的
- 如果两张图片是同一个人,则相似性很高,差异很小,输出一个很小的值
- 如果两张图片不是同一个人,则相似性很低,差异很大,输出一个很大的值

- 预测:输入一个新的图像,和数据库图像之间逐个比较,就知道这个人是哪个了
Siamese网络
- 相似性函数d:输入两张人脸,告诉其相似度
- 做法:
- 图片1通过网络编码为向量1
- 图片2通过网络编码为向量2
- 两个向量之间的距离定义为两个图片的差异

- 同一个神经网络
- 神经网络的参数定义了一个编码函数,参数不同,编码的结果不同。通过反向传播,获得最优的参数。

Triplet损失
- 参数学习:定义三元组损失函数然后应用梯度下降
- 三元组损失:
- 三张图片:Anchor图片(A),Positive图片(P),Negative图片(N)
- 两个距离:A、P之间的距离,A、N之间的距离
- 希望满足AP之间的距离小于AN之间的距离:\(\|f(A)-f(P)\|^2 <= \|f(A)-f(N)\|^2\)。比如下图中,AP是同一个人,AN不是同一个人,所以希望前者很接近,后者很不接近。

- 模型偷懒:
- 需满足:\(\|f(A)-f(P)\|^2 - \|f(A)-f(N)\|^2 <= 0\)
- 假如f函数对于任意的图片编码,总是为0,那么上面的式子就是:0-0<=0,是总是成立的
- 为了防止网络输出无用的结果,可以🙆两者的差值不是小于0,而是一个更小一点的负数,即:\(\|f(A)-f(P)\|^2 - \|f(A)-f(N)\|^2 <= -a\)
- 这里的-a叫做间隔(margin),类似于SVM里面的
- 例子:
- 假如a=0.2,d(A,P)=0.5,如果d(A,N)=0.51,只比d(A,P)大了一点点,但是不满足两者之间的最小间隔,所以此时模型不够好。
- 损失函数:
- 取0和上面等式值的最大值
- max函数的作用:只要前半部分的值<=0,那么损失就是0,所以模型会想办法让前半部分更小

- 三元组图片的选取:
- 随机选取。在满足AP是同一人,AN不是同一人的条件下,随机选取图片组成三元组,此时是很容易满足\(\|f(A)-f(P)\|^2 - \|f(A)-f(N)\|^2 <= -a\)这个的。因为随机时,AN差别比AP差别很大的概率很大。此时网络不能学习到什么。
- 构造难的三元组。所以应该选取比较难以区分的三元组,比如AP的距离和AN的聚集近似相等的。为了保证他们之间相差一个间隔,模型会尽力使得后者的距离变大,或者AP的距离变小。

人脸验证与二分类
- 做法:
- 神经网络对于输入的两个图片进行特征编码
- 将特征向量输入到逻辑回归单元,进行预测
- 如果是相同的人,输出1;不同的人,输出0
- 如此:把人脸识别问题转换为二分类问题

- 如何使用逻辑回归?
- 输入是两个图片,对应两个编码的特征向量
- 这两个特征向量之间是有关系的
- 可以使用对应特征属性的差值,输入到逻辑回归单元
- 也可以使用其他的变换,比如x平方相似度输入到逻辑单元
- 最后的输出是0(不同人)或者1(同一人)

- 训练集:
- 监督学习,需创建只有成对图片的训练集
- 标签1:这一对图片是同一人
- 标签0:这一对图片是不同的人
神经风格迁移
- C:内容图像
- S:风格图像
- G:生成的图像

- 为什么可以做到?需要理解CNN由浅层到深层的特征表示,逐渐的都学习到了什么!
CNN特征可视化
- 做法:
- 对于某一层网络,选取一个神经单元,然后找到使得神经单元激活最大的一些(比如9个)小块
- 对于其他的一些神经元重复上面的操作
- 例子:这里选取的是layer1的神经元,对每个神经元,选取9个其最大激活的patch,然后画出来。这里相当于是选取了9个神经元,每一个含有9个patch。
- 可以看到,不同的神经元激活得到不同的特征,比如有的是针对右斜45‘线条的,有的是左斜45’线条的。有的是一些边缘,有的是一些颜色阴影。每一个不同的图片块都最大化激活了。

- 可以看到,不同的神经元激活得到不同的特征,比如有的是针对右斜45‘线条的,有的是左斜45’线条的。有的是一些边缘,有的是一些颜色阴影。每一个不同的图片块都最大化激活了。
- 其他层:
- 同样的,可以对其他层,比如更深的层进行同样的操作,查看所在层提取的特征
- 更深的层一般可以检测到更加复杂的特征
- 比如这里的第二层:编号1检测垂直图案,编号2检测有圆形的,编号3检测很细的垂线
- 第三层:编号1对图片左下角的圆形很敏感,编号2检测人类,编号3检测特定蜂窝状图案
- 第四层:可以检测到更复杂的,编号1检测狗狗,很类似的狗狗,编号3检测到鸟的脚
- 第五层:复杂的事物,编号1检测不同的狗,编号2检测键盘或类似物,编号3检测文本,编号4检测话

代价函数
- 给定C和S,生成G。那么需要有一个函数去评价G的好坏!
- 关于G的函数:
- 表示:\(J(G)=\alpha J_{content}(C,G)+\beta J_{style}(S, G)\)
- 内容代价:度量生成图片G与内容图片C的内容有多相似
- 风格代价:度量生成图片G的风格与图片S的风格的相似度
- 两者之间的权重由两个超参数与来确定
- 算法:
- 随机初始化生成G
- 使用梯度下降的方法,使得代价函数J(G)最小化,更新G,也就是更新图像G中的像素值
- 经过不断的迭代之后,会生成一个越来越具有特定风格的图像G

内容代价函数
- 是什么?
- 是总代价函数的一部分
- 使用隐藏层l计算内容代价。如果l很小,那么此时生成的图片会很接近原图;如果l很大(深层),会问此时的图片内容是否含有内容对象(比如狗)。因此,在实际中层l不会选的太浅也不会选的太深。
- 使用的模型可以是预训练的卷积模型。比如VGG模型等。
- 衡量一个内容图片和生成图片的相似度?
- 两个图片C和G
- 一个隐藏层l
- 图像在此隐藏层上的激活值
- 如果此激活值相似,那么两个图片的内容相似
- 定义:\(J_{content}(C,G)=\frac{1}{2}\|a^{[l][C]}-a^{[l][G]}\|^2\),两个激活值按元素相减,然后取平方
风格代价函数
- 图片风格:
- 一个图片输入到神经网络中
- 选择某一层l
- 风格:l层中各个通道之间激活项的相关系数

- 通道间相关系数的计算?
- 某一层l是含有多个通道的
- 每一通道相当于含有多个神经元(激活项)
- 可计算任意两个通道之间激活项值的相关系数
- 例子:比如下图左边某一层l中,有nc个通道,任取两个通道(编号1和2的),那么每个通道有nh x nw个激活项,可以计算这两个通道之间的相关系数。

- 通道间相关系数表示什么含义?
- 上面图片例子
- 编号1通道提取的特征是右边的编号3,垂直纹理特征
- 编号2通道提取的特征是右边的编号4,橙色区域的特征
- 如果相关(相关系数大),表示两个特征相关,说明图片中有垂直纹理的地方很大概率也是橙色的
- 如果不相关(相关系数小),表示两个特征不相关,说明图片中有垂直纹理的地方很大概率不是橙色的
- 表示:每个通道测量的特征在各个位置同时出现或者不出现的概率
- 风格矩阵:
- 通道1:激活项值
- 通道2:激活项值

- 激活值:\(a_{i,j,k}^{[l]}\),这是第k通道,高度=i,宽度=j处的激活项
- 第l层:\(G^{[l](s)}, n_c^{[l]} \times n_c^{[l]}\),第l层(通道)的所有激活值
- 两个通道的相关系数:两个通道上的激活项进行相乘在相加(非标准的互相关函数,因为没有减去平均数,而是直接相乘)
- 如何评估风格图像和生成图像的风格是否相近?
- 风格图像:风格矩阵
- 生成图像:风格矩阵
- 有了两个图像的风格矩阵之后,就可以评估这两个矩阵的相似性了
- 计算:矩阵对应元素相减的平方和(类似于mse)

- 风格代价函数:
- S、G风格矩阵的误差平方和

- S、G风格矩阵的误差平方和
一维和三维卷积
- 卷积操作可推广到1维或者3维
- 输出大小的公式还是同样的使用,只是维度变了,对应的维度计算即可

参考
Read full-text »
【4-3】目标检测
2019-03-01
目录
目标定位
- 分类:判断其中的对象是不是某个(比如汽车)
- 定位分类:判断是不是汽车,且标记其位置
- 检测:含有多个对象时,检测确定它们的位置

- 分类网络:
- 图片输入到卷积神经网络
- 输出特征向量
- softmax预测图片类型
- 定位分类网络:
- 图片输入到卷积神经网络
- 输出特征向量
- softmax预测图片类型+输出边界框【让神经网络多输出几个单元即边界框】

- 边界框表示:
- 图片坐上角:(0,0)
- 图片右下角:(1,1)
- 边界框中心坐标:(bx, by)
- 边界框高度:bh
- 边界框宽度:bw
- 训练集:预测对象的分类+表示边界框的四个数字
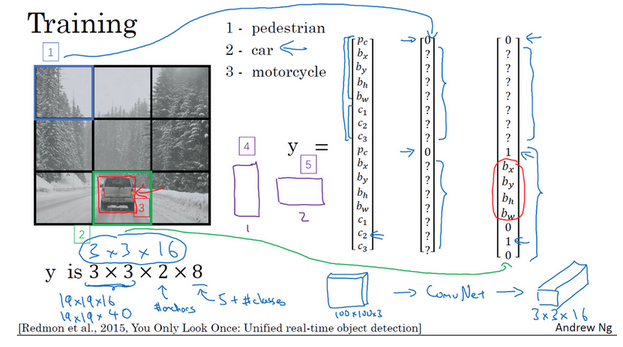
- 目标标签如何定义(训练集):
- 分类标签:
- Pc:是否含有对象,有=1,无=0
- c1:有行人对象
- c2:有汽车对象
- c3:有摩托车对象
- 边界框:
- 如果对象存在(即Pc=1):此时四个有四个数值bx, by,bh,bw
- 如果对象不存在(即Pc=0):其他参数(c1,c2,c3,bx, by,bh,bw)均为问号”?“,表示毫无意义的参数。
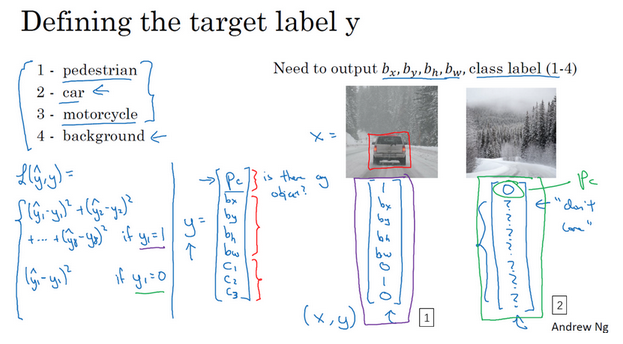
- 分类标签:
- 损失函数:
- 平方差策略:每个元素相应差值的平方和
- 有定位对象:y1=1,Pc=1,损失值是不同元素的平方和
- 无定位对象:y1=0,Pc=0,此时不用考虑其他元素,只关注神经网络输出Pc的准确度。
- 通常:(1)对边界框左边应用平方差或类似方法,(2)对Pc应用逻辑回归函数
特征点检测
- 特征点检测:landmark detection,给出物体的特征点的具体位置,比如人脸识别中眼睛的位置
- 网络:
- 和上面目标定位类似:定位是用四个值框出具体的位置
- 对于我们关注的特征点,可以用一个坐标表示一个特征点
- 比如左眼睛坐标,右眼睛坐标等
- 输出:softmax预测图片类型+输出每个考量的特征点的坐标
- 比如人脸识别:是否有人脸+左眼位置+右眼位置+。。。

- 人体姿态检测:输出关键特征点,比如左肩、腰等,就能知道人物所处的姿态了
- 训练集:
- 标签包含特征点的坐标
- 图片中特征点的坐标是人为辛苦标注的
- 特征点的特性在所有图片中必须保持一致。比如特征点1始终是左眼的坐标值,特征点2始终是右眼的坐标值。
目标检测
- 对象检测:基于滑动窗口的目标检测算法
- 基本步骤:
- 训练集:剪切的含有或者不含有汽车的图片作为正负样本
- 卷积神经网络进行训练
- 在新的图片上进行滑动窗口目标检测
- 图像滑动窗口操作:
- 选定一个大小的窗口,输入上面训练好的卷积神经网络,判断此方框中是否含有汽车。滑动窗口,重复操作,直到滑过所有角落。
- 选定一个更大一点的窗口,重复滑动检测的操作。
- 选定一个再大一些的窗口,重复滑动检测的操作。
- 如果有汽车,总有一个窗口可以检测到它。

- 缺点:
- 计算成本太大
- 剪出很多的小方块,卷积网络一个个的处理
- 如果步幅大:窗口少,但是可能检测性能不好
- 如果步幅小:窗口多,超高的计算成本
- 以前是一些线性分类器,计算成本不是太高;但是对于卷积神经网络这种分类器,成本很高。
滑动窗口的卷积实现
- 滑动窗口检测算法:效率低
- 卷积实现:效率高
- 实现1:将全连接层转换为卷积层
- 一般的CNN分类在卷积层后面是会有全连接层的
- 可以将FC层转换为卷积层
- 这里就会用到1x1的过滤器,来改变通道数量,也就是最后哦输出的大小

- 例子:原来是通过FC,最后得到4个类别的概率值
- 现在通过三个过滤器,最后也得到这4个值,只不过是通过卷积的形式得到的
- 实现2:一次输入图片(滑动窗口的卷积实现)
- 理论上每次一个窗口输入到CNN中进行预测分类。
- 但是把所有的窗口分别输入到CNN中,其实就是一次做一个卷积操作。因为卷积时也是会通过步幅来遍历整个图片的,每次遍历的某一个方块其实也就是某一个窗口。
- 因此可以通过卷积来实现一次对所有的窗口进行预测的目的。
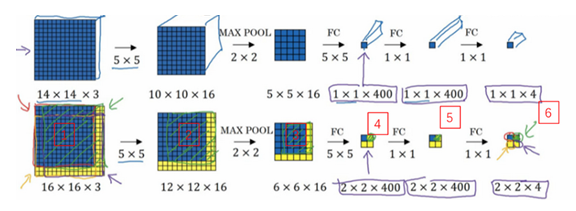
- 上面例子:
- 原来:每次输入一个窗口,最后得到此窗口的输出1x1x4的
- 现在:一次把图片输入,得到2x2x4的输出,因为遍历了4个,相当于上面的4次分别输入。
- 原理:
- 不需要把输入图像分割成四个子集,再分别执行前向传播
- 而是把他们作为一张图片输入给卷积网络计算
- 其中的公共区域可以共享很多计算,也减小了计算量
- 缺点:
- 虽然提高了算法的效率
- 边界框的位置可能不够准确
Bounding Box预测
- 滑动窗口检测:不能输出最精确的边界框
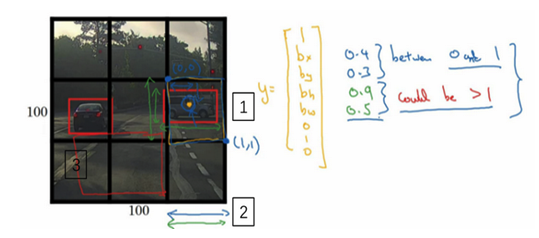
- YOLO算法:
- You Only Look Once
- 更精确的边界框
- 思路:使用精细的网格(比如19x19)将图像分隔开,对于每一个小的网格,使用前面的分类和定位算法,那么对于每一个网格,可以得到一个八维的向量(Pc,c1,c2,c3,bx, by,bh,bw)。所以整个图片就得到一个19x19x8的向量。就能够知道在哪个网格中是有汽车的,且是包含了更准确的一个边界框。

- 例子:上面是3x3的网格,最后知道在网格4和6中是有汽车的
- 注意:对象是按照其中点所在网格算的,比如网格5包含有左侧汽车的一部分,但是因为此汽车的中点是在网格4中,所以此汽车分配与网格4,而不是网格5。
- 坐标表示:
- 之前滑动窗口坐标是相对于整个图片的
- YOLO这里是相对于每个网格的
- 网格坐上是(0,0),右下是(1,1),宽度和高度是相对于此网格的比例,是0-1之间的值。
- 优点:
- 网格精细得多,多个对象分配到同一个网格的概率小很多
- 可以具有任意宽高比
- 输出更精确的坐标
- 不会受到滑动窗口分类器的步长大小限制
- 一次卷积运算:效率很高
交并比
- 交并比:
- Intersection Over Union
- 计算两个边界框交集和并集之比
- 评价对象检测算法是否精确

- 一般取:IoU>=0.5,认为检测正确
- 0.5是约定的值,也可以采取其他更严格的值
非极大抑制
- 非极大抑制:non-max suppression
- 算法对同一个对象做出多次检测
- 可以确保对每个对象只检测一次
- 疑问:但是不是中点所在的网格才算吗?检测多次有什么影响呢?中点所在的那个网格并不是概率最大的?
- 理论上是只有一个格子,但是实践中会有多个格子觉得存在检测的对象
- 只输出概率最大的分类结果,但是抑制很接近但不是最大的其他预测结果

- 直观理解:
- 对于某些重叠的box,只取概率最大的
- 其他重叠的则被抑制而不输出
- 比如下面例子中:对于右边的车子,有几个box说检测到了,但是概率是不一样的,只留取最大的(高亮),其他的都被抑制掉(变暗)
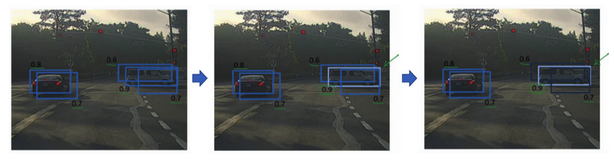
- 具体算法:
- 丢掉预测概率很低的一些边界,比如Pc<=0.6的
- 对剩下的,选取概率最大的边界框(高亮)丢掉与此边界框高度重合的其他边界框(比如IoU>=0.5的)

Anchor boxes
- 目的:处理两个对象出现在同一个格子的情况
- 算法:
- 不使用:根据每个对象所在的中点分配给对应的格子。输出:比如是3x3x8,8个长度的向量表征所在格子
- 使用:根据每个对象所在的中点分配给对应的格子,且分配给与所在格子有最大交并比的anchor box。输出:3x3x16,比如有两个anchor box,前8个表示第一个anchor box的信息,后8个表示第二个anchor box的信息

- 例子:
- 2个anchor box:1个是行人,1个是汽车形状
- 对于箭头所指的网格(编号2),汽车和行人对象的中点都在此网格中。且此对象与两个anchor box均有很高的交并比,所以在这两个都是有信息的。
- 对于右下角的那个格子,只有汽车,没有行人,那么此时y的表示同样包含两个anchor box的部分,但是对于第一个anchor box(行人形状)是没有信息的(问号”?“表示)

- 注意:
- 假如同一个格子有3个对象怎么办?一般处理不好,除非最开始定义多个anchor box
- 两个对象分配到一个格子,且他们anchor box形状一样
- 两个对象中点处在同一个格子中的概率很低,尤其是当格子数目很大的时候
- anchor box形状指定:手工指定,选择5-10个覆盖想要检测的对象的各种形状;更高级的是使用k-均值算法自动选择anchor box
YOLO算法
- 算法输出是包含anchor box信息的,所以在训练集的label中也是要包含这部分信息的
- 训练:
- 构造训练集,人为标注
- 比如对于下面的格子1,什么也没有,其label对应的两个anchor box类别为0,其他边界的信息都以问号表示
- 对于下面的格子2,只有汽车,其label对应的第一个anchor box为0,边界是问号;第二个anchor box是1,且有具体边界
- 预测:
- 构建好了模型,怎么对新图片进行预测?
- 分好格子,每个格子运行神经网络(一次的卷积实现)
- 但是此时对于没有anchor box信息的,输出的边界是一些噪音值,而不是问号

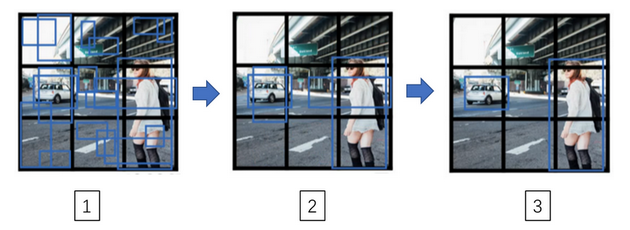
- 预测后的非极大抑制处理:
- 对于获得的结构需要进行非极大抑制处理
- 注意:每个类别分别做非极大抑制

- 例子:从1到2,是丢掉预测概率很低的类别的边界;从2到3,是对于剩下的边界,每个类别单独非极大抑制处理
候选区域
- 候选区域:
- 使用某种算法求出候选区域,对每个候选区域运行一下分类器
- 为什么?图片很多的地方没有任何对象,在这些区域进行检测(滑窗或者卷积)是在浪费时间
- 如何挑选候选区域?
- 图像分割算法:使用图像分割算法,得到一些可能存在对象的区域
- 代表:R-CNN(带区域的卷积网络)
- 对于挑选的区域,使用滑窗

- R-CNN变种:
- R-CNN还是太慢了
- Fast R-CNN:R-CNN的卷积实现,显著提升了速度
- Faster R-CNN:使用碱基神经网络实现图像分割,获取候选区域,而不是使用更传统的分割算法获取候选区域,算法快很多
- 大多数快R-CNN还是比YOLO算法慢很多
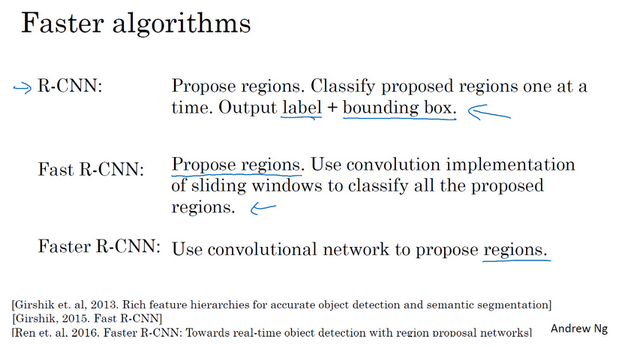
- 吴:认为一步做完的类似YOLO算法长远是更有希望的
参考
Read full-text »
【4-2】深度卷积网络:实例探究
2019-02-26
目录
经典网络
- CNN网络的发展历史:
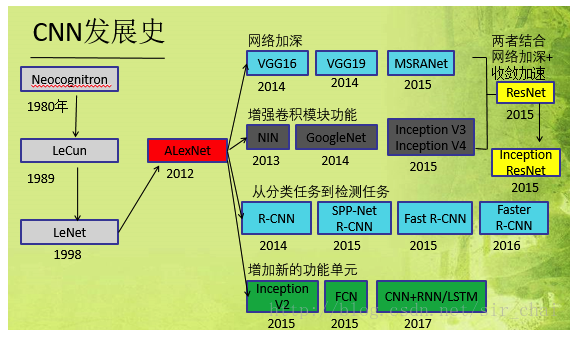
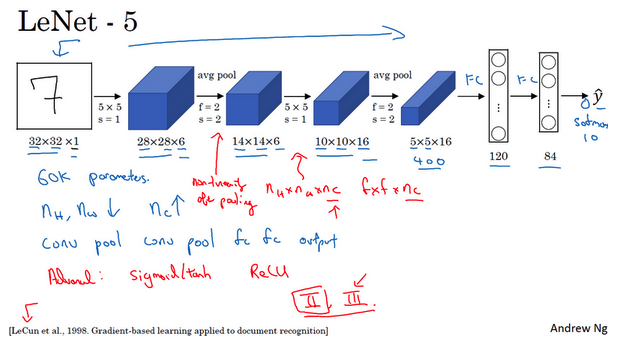
- LeNet-5:
- 识别手写数字
- 针对灰度图像进行训练
- 大约6万个参数
- 模式:一个或多个卷积层后面跟着一个池化层,然后又是若干个卷积层再接一个池化层,然后使全连接层,最后是输出。这种排列方式很常用。
- 非线性处理:使用sigmoid函数和tanh函数,而不是ReLU函数
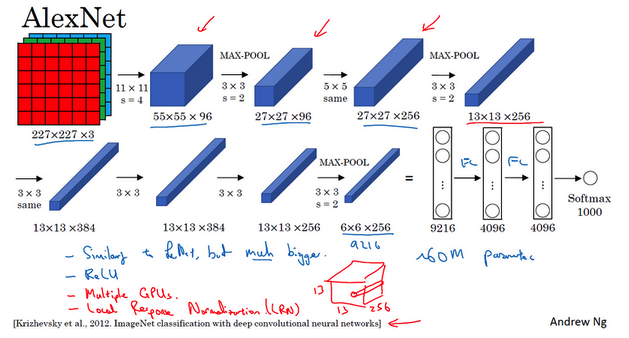
- AlexNet:
- 以第一作者Alex Krizhevsky的名字命名
- 与LeNet-5很多相似处,大得多
- 含有约6000万个参数
- 使用ReLU激活函数,使得其表现更加出色的另一个原因
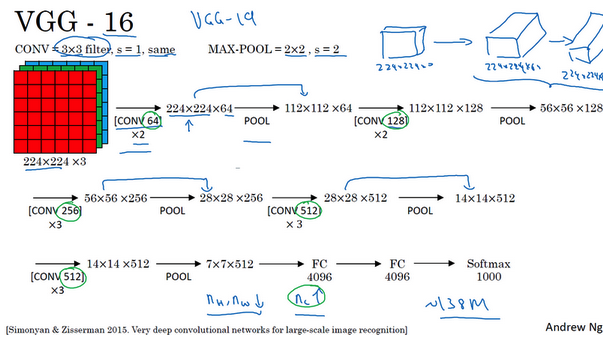
- VGG-16:
- 没有特别多的超参数
- 只需要专注于构建卷积层的简单网络
- 优点是简化了神经网络结构(相对一致的网络结构)
- 缺点是:需要训练的特征数量非常巨大
- 包含16个卷积层和全连接层
- 约1.38亿个参数,但是结构不复杂
- 亮点:随着网络的加深,图像的高度和宽度都在以一定的规律不断缩小,每次池化后刚好缩小一半,而通道数量在不断增加,而且刚好也是在每组卷积操作后增加一倍。
残差网络
- 神经网络训练难:非常深的神经网络训练困难,存在梯度消失和梯度爆炸
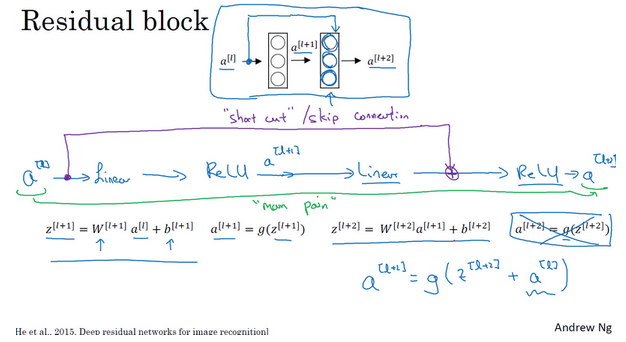
- 跳跃连接:从某一层网络层获得激活,然后迅速反馈给另外一层,甚至是神经网络的更深层。比如下面的a(l)跳过一层或者好几层,从而将信息传递到神经网络的更深层。
- 残差块:
- 主路径:一层一层向后传播,首先是线性激活,由a(l)得到z(l+1) ,然后是非线性激活,由z(l+1)得到a(l+1) ,依次向后传播。a(l) => z(l+1) => a(l+1) => z(l+1) => a(l+2)。正常的时候信息流从a(l)传到a(l+2)需要经过这些步骤。
- 残差块:将a(l)拷贝到后面的层,在非线性激活前加上这个拷贝的a(l)。对于这里向后拷贝2层,就是\(a^{[l+2]}=g(z^{[l+2]}) => a^{[l+2]}=g(z^{[l+2]}+a^{[l]})\)。也就是这里加上的a(l)产生了一个残差块。
- ResNet:何凯明、张翔宇、任少卿、孙剑
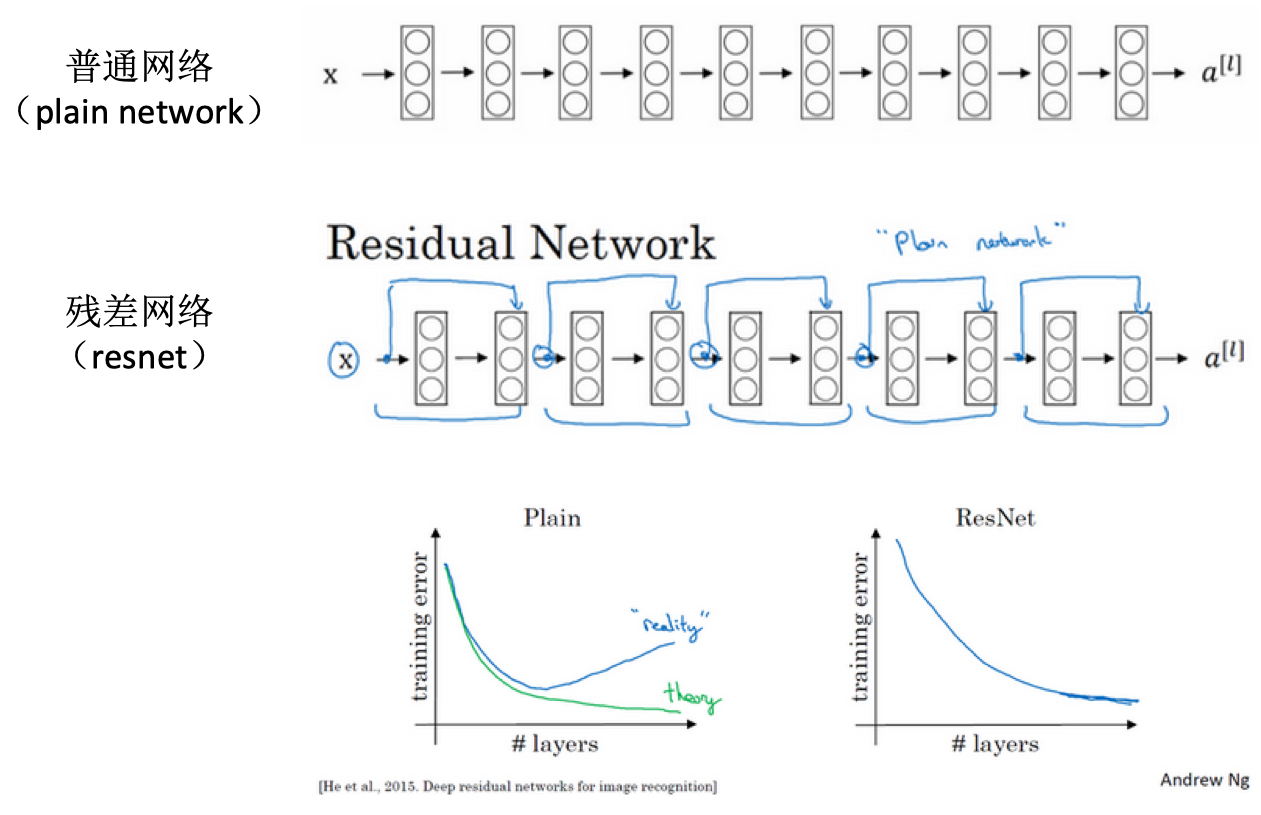
- ResNet vs plain net:
- 普通网络:深度越深则优化算法越难训练,训练错误会越来越多
- 残差网络:训练误差在很深的网络也能很小
- 为什么残差网络有用?
- 基础:模型在训练集上训练效果好
- 容易学习恒等式:对于加入残差后在进行非线性变换之前的项,如果深度很深,那么此时可能权重(w)和偏差(b)为0。如果用的是ReLU激活函数,a(l)是大于0,激活后\(a^{[l+2]} = g(W^{[l+2]}a^{[l+1]} + b^{[l+2]} + a^{[l]}) = g(a^{[l]}) = a^{[l]}\)
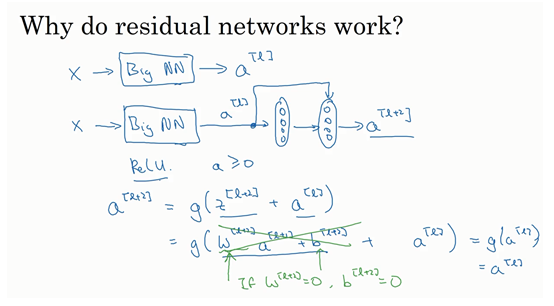
- 此时增加了两层,其效率不逊色于简单的网络
- 很多时候甚至可以提高效率
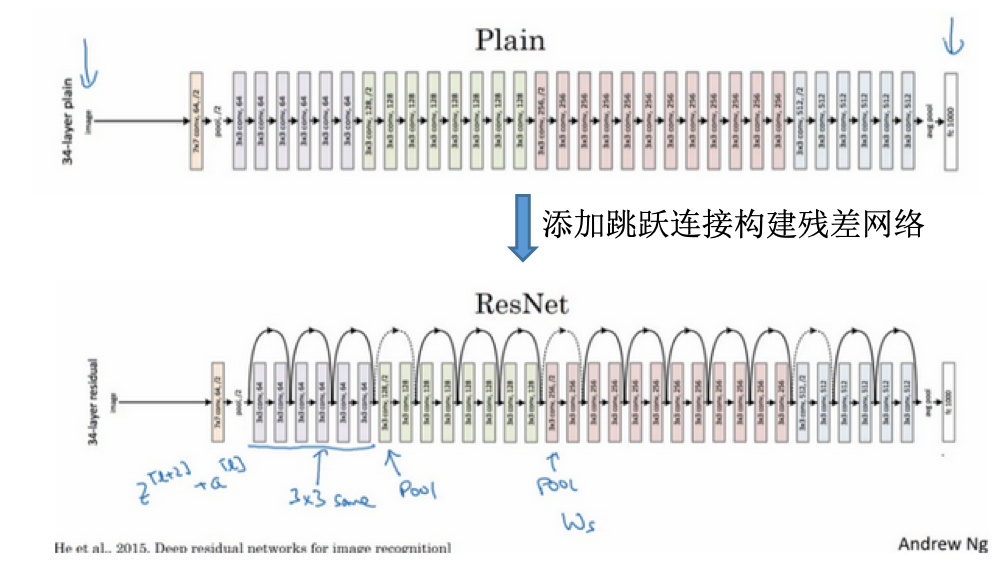
- 假如z(l+2)与a(l)有相同维度,那么a(l)的维度等于这个输出层的维度,使用了许多same卷积。
- 论文中的网络:
- 很多3x3的卷积,且大多是same卷积
- 维度得以保留,所以可以直接相加
网络中的网络及1x1卷积
- 1x1卷积于二维:
- 输入:6x6x1
- 过滤器:1x1x1
- 作用:把图片每个像素乘以一个数字
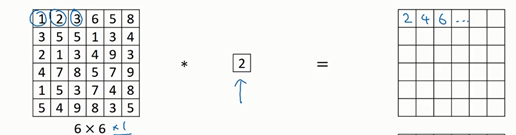
- 1x1卷积于三维:
- 输入:6x6x32
- 过滤器:1x1x32
- 作用:对相同高度和宽度的某一切片上的32个数字,乘以一个权重(即过滤器中的32个数字)
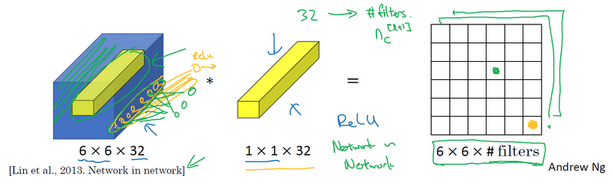
- 作用:对32个不同的位置应用一个全连接层,在输入层上实施一个非平凡的计算
- 压缩作用:
- 池化层:压缩高度和宽度。经过池化之后,图像的大小变成原来的一半,并一直减小
- 1x1卷积:压缩通道数。当每个过滤器的深度和原图像深度一样时,但是使用不同的过滤器数目,可以使得输出的通道数变化(变大变小等)。
谷歌Inception网络
- 为什么出现Inception网络?
- 参考这里的背景介绍
- CNN结构演化图:
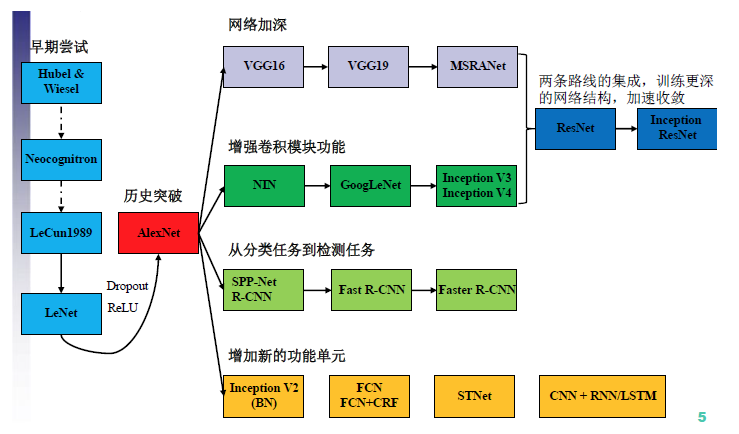
- GoogLeNet出来之前:对于网络的改进是,网络更深(层数),网络更宽(神经元数目)
- 缺点:(1)参数太多,容易过拟合;(2)网络越大计算复杂度越大;(3)网络越深,会出现梯度消失,难以优化
- 解决:增加网络深度和宽度的同时减少参数,于是就有了Inception。
- Inception:
- 盗梦空间的电影名称
- 替你决定过滤器的大小选择多大
- Inception模块:
- 将1x1,3x3,5x5的conv和3x3的max pooling,堆叠在一起
- 增加了网络的宽度
- 增加了网络对尺度的适应性
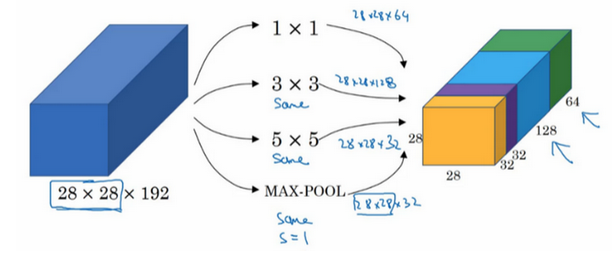
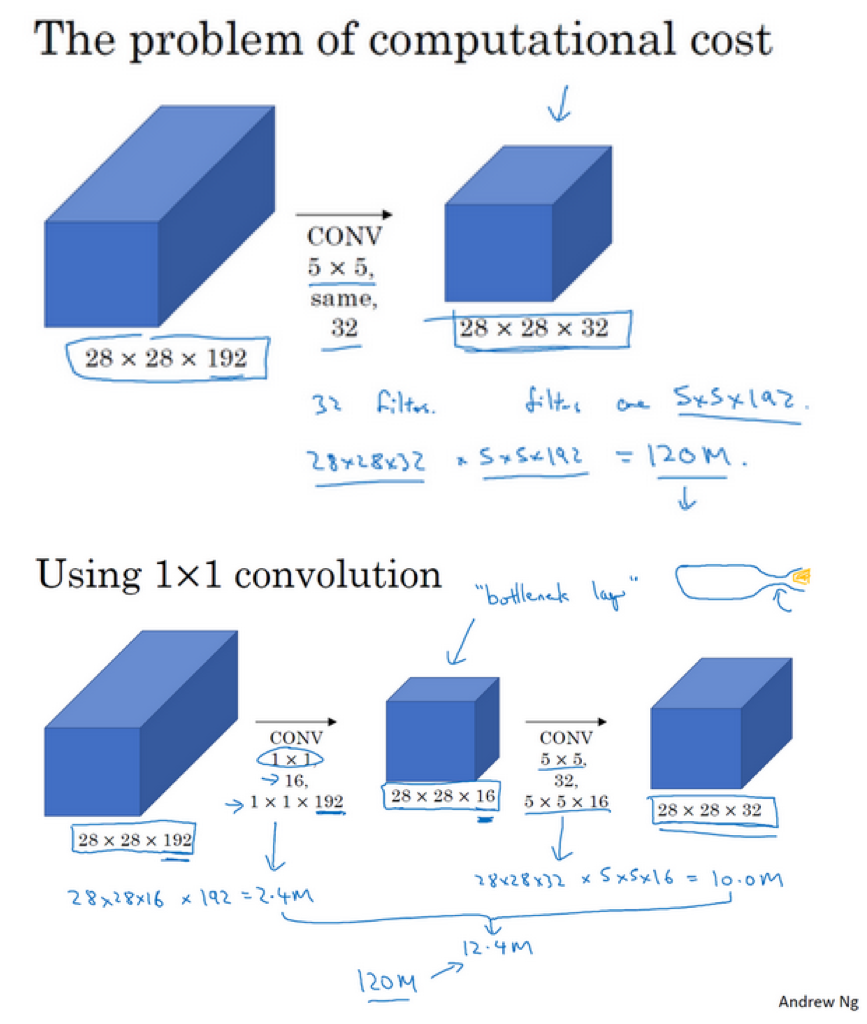
- 计算成本:
- 可以看到,上面的网络中使用不同的过滤器大小进行卷积操作,其计算的成本是很高的
- 比如对于5x5的卷积:过滤器大小(5x5x192)x输出大小(28x28x32)=1.2亿
- 为了降低计算成本,引入1x1卷积操作,因为其是可以用来降低通道数目的
- 此时计算成本:前部分28x28x16x192,后部分28x28x32x5x5x16=1.2亿【计算成本降低为原来的10%】
- 在构建神经网络时,不想决定池化层是使用1x1,3x3还是5x5的过滤器,Inception模块是最好的选择
- Inception网络:
- 将Inception模块组合起来
- 有很多重复的模块在不同的位置组成的网络
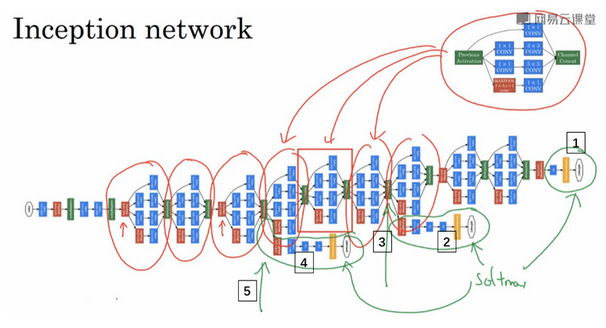
- 其他版本:引入跳跃连接等
迁移学习
- 大型的数据集:
- ImageNet
- MS COCO
- Pascal
- 研究者已经在这些数据上训练过他们的算法,训练花费长时间多GPU
- 迁移学习:
- 下载开源的权重参数,当做一个很好的初始化用在自己的神经网络上
- 用迁移学习把公共的数据集的知识迁移到自己的问题上
- 值得考虑,除非你有一个极其大的数据集和非常大的计算量预算来从头训练你的网络
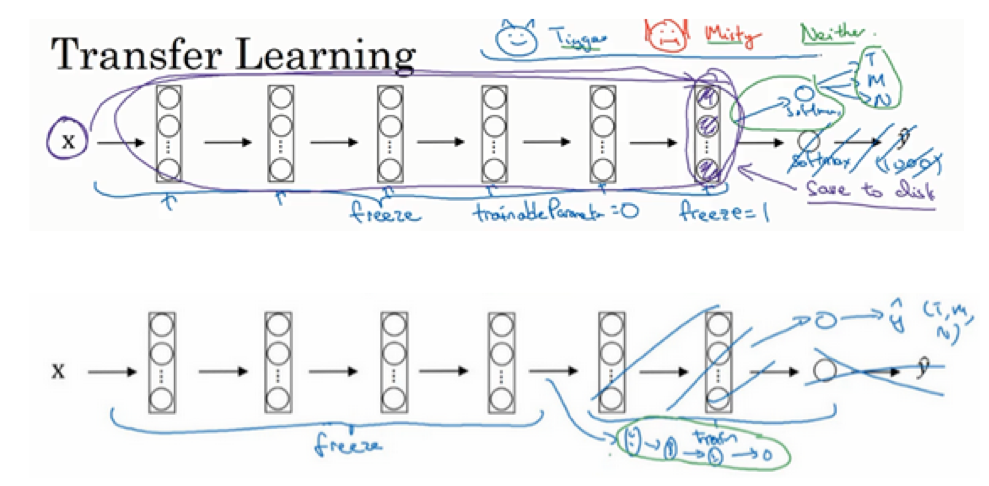
- 例子:
- 图片猫咪类型识别:只有3种,猫咪1+猫咪2+都不是
- 迁移:基于imagenet数据集学习的分类器,但是其有1000类,即其softmax输出是1000种
- 做法:可以只训练softmax层(3种输出),前面的网络结构和权重完全冻结保持不变,直接进行训练
- 通常:如果你有越来越多的数据,你需要冻结的层数越少,能够训练的层数就越多
数据增强
- 数据扩充:
- 经常使用的一种技巧来提高计算机视觉系统的表现
- 方法:
- 常见的方式有
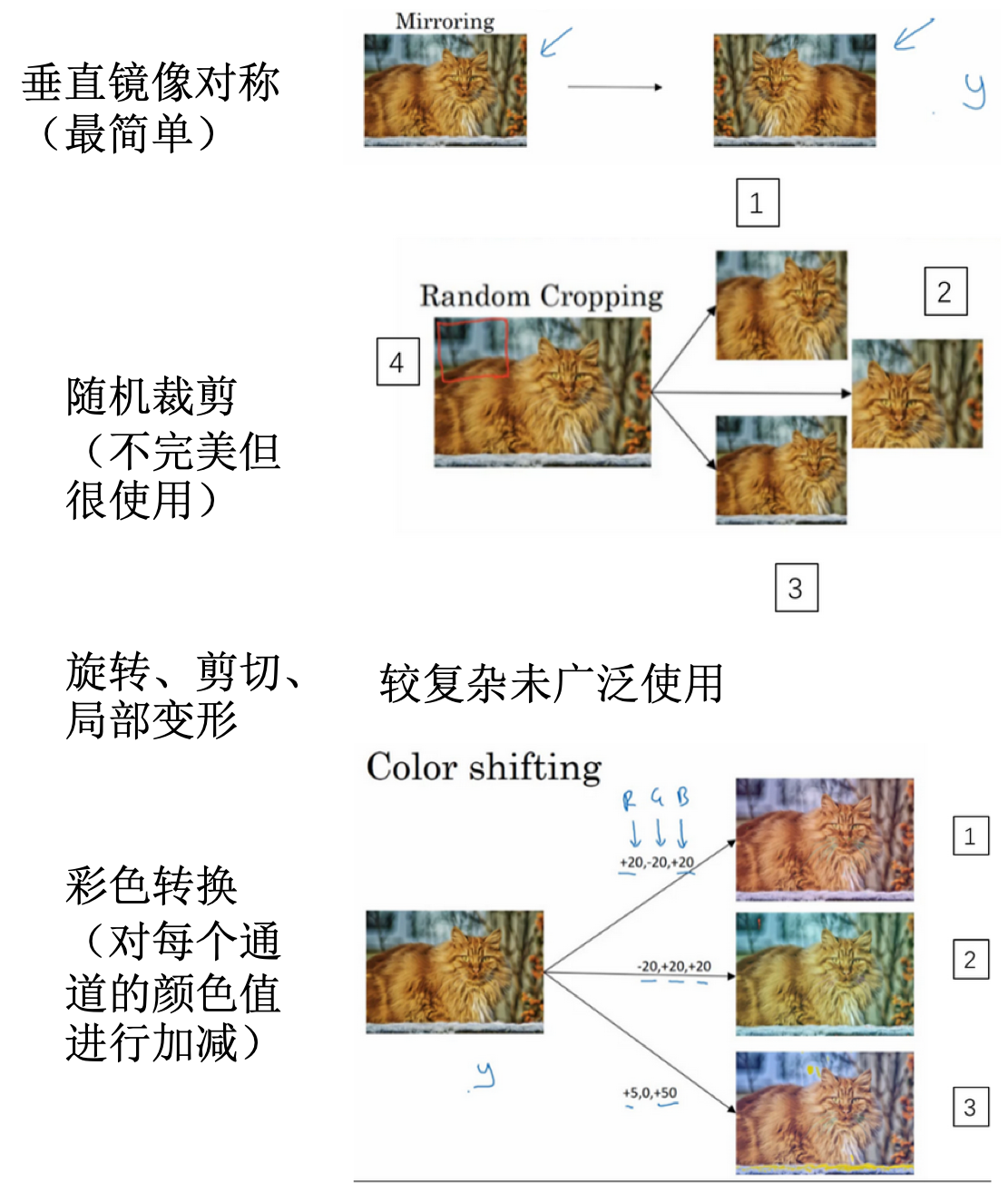
- 常见的方式有
计算机视觉现状
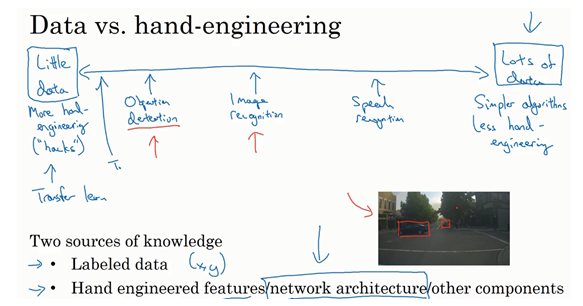
- 机器学习问题:介于少量数据和大量数据范围之间
- 知识或者数据的来源:
- 被标记的
- 手工工程。一般其实是崇尚更少的人工处理
- 基准测试技巧:
- 集成。比如在多个网络中训练,取其平均结果。
- multi-scrop:裁剪选取一个中心区域,取其四个角得到四个样本,其实还是属于样本扩充。对于计算量要求很高。
- 需要耗费大量的计算,不是服务于客户的,只是为了在基准测试中取的好的效果
参考
Read full-text »
pytorch
2019-02-20
目录
概述
pytorch: 基于python的科学计算包
- 替代numpy,利用GPU性能进行计算
- 高灵活性、速度快的深度学习平台
基本概念
3层抽象:
- tensor:imprerative array, but runs on GPU
- variable: node in a graph, store data and gradient
- module: a neural network layer, store state or learnable weights
张量(tensor):类似于numpy里面的数组array,在GPU上可实现加速计算。
张量的基本操作:
from __future__ import print_function
import torch
# 把生成的memory返回到x,不同批次调用此函数返回值是不同的
# https://stackoverflow.com/questions/51140927/what-is-uninitialized-data-in-pytorch-empty-function
x = torch.empty(5, 3)
# 随机初始化一个矩阵
x = torch.rand(5, 3)
# 全0矩阵
x = torch.zeros(5, 3, dtype=torch.long)
# 直接张量赋值
x = torch.tensor([5.5, 3])
# 全1矩阵
x = x.new_ones(5, 3, dtype=torch.double)
# 获取x的shape,随机生成矩阵
# x = torch.randn_like(x, dtype=torch.float)
张量的基本运算:
# 加法
x = torch.tensor([5.5, 3])
y = torch.rand(5, 3)
print(x + y)
# 加法
print(torch.add(x, y))
# 加法
result = torch.empty(5, 3)
torch.add(x, y, out=result)
# 原位加法,此时y的值是改变的
y.add_(x)
# 取值
print(x[:, 1])
# 改变array形状
x = torch.randn(4, 4)
y = x.view(16)
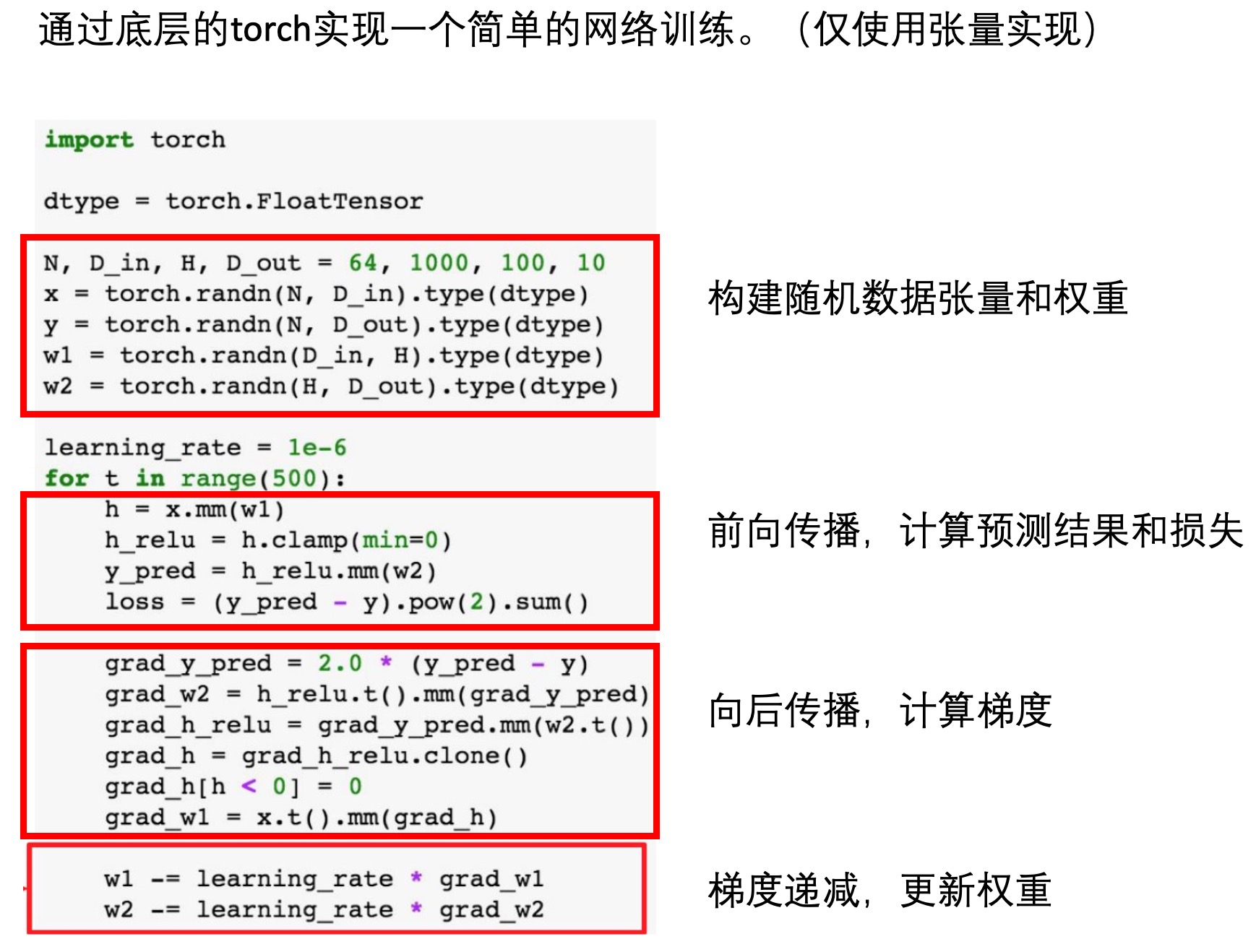
下面是一个使用底层张量实现的网络训练:
Autograd:自动求导
张量的求导是可追踪的,即某个张量的求导设置为true时,基于此张量的操作或者后续张量,其也是具有可求导属性的。
a = torch.randn(2, 2)
a = ((a * 3) / (a - 1))
print(a.requires_grad)
a.requires_grad_(True)
print(a.requires_grad)
b = (a * a).sum()
print(b.grad_fn)
# False
# True
# <SumBackward0 object at 0x7f1b24845f98>
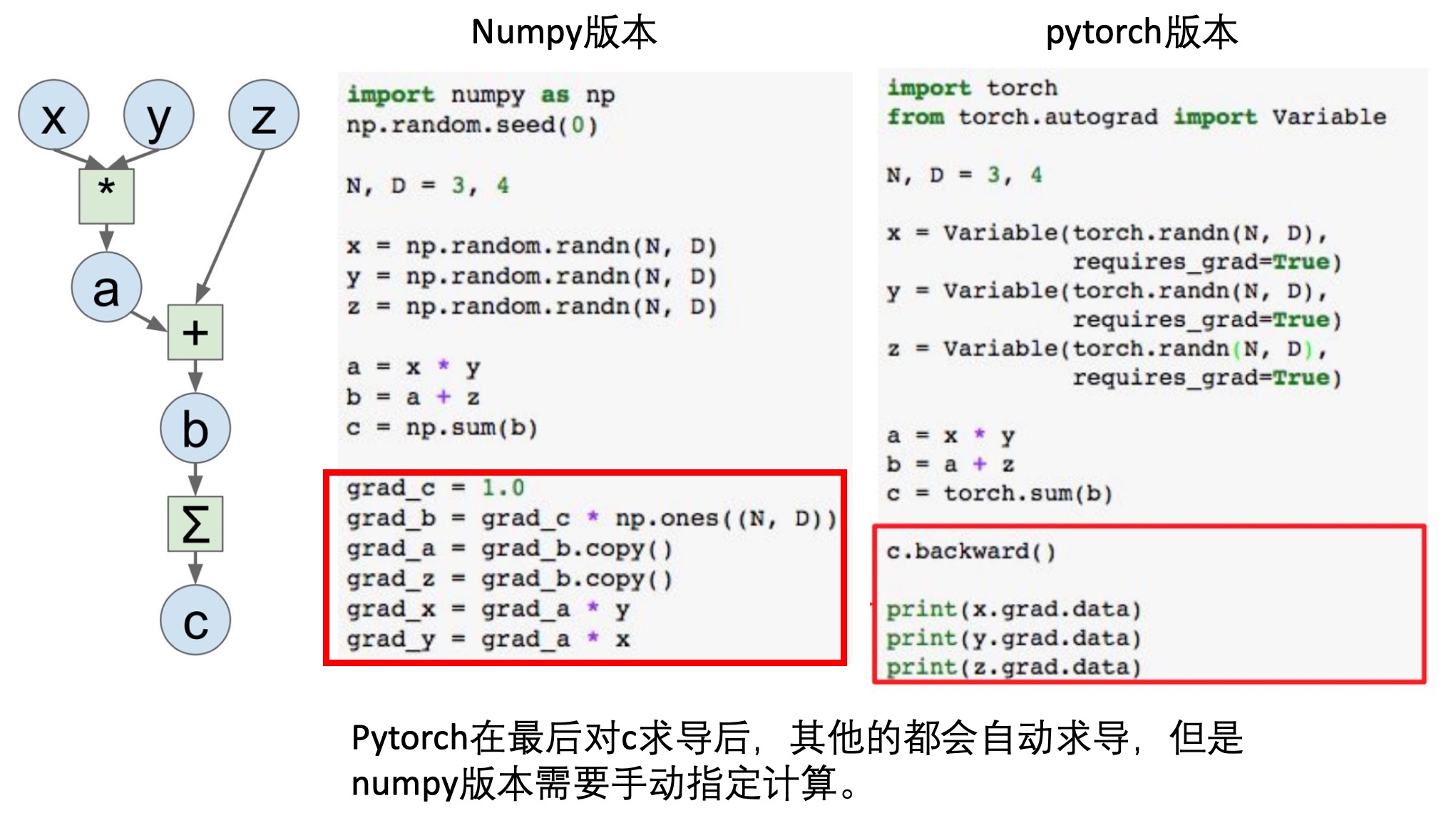
下面是对于变换过程中的求导,在numpy和pytorch中的实现,可以看到,后者能够实现追踪:
示例: 手写数字识别的LeNet5卷积神经网络

准备数据
加载数据的方法有多种(如下图):
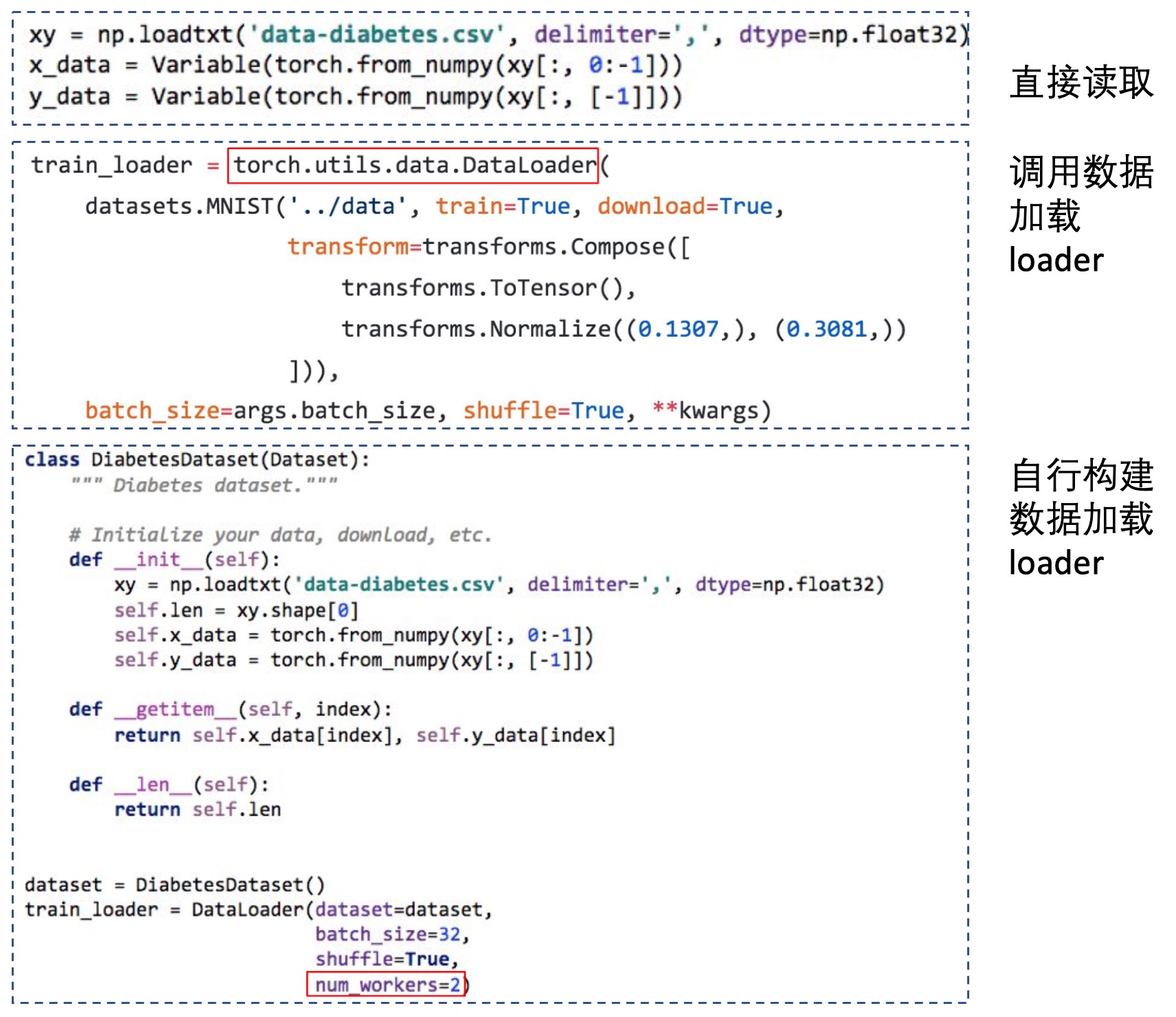
这里使用的数据集都是比较经典的,一般使用torch.utils.data.DataLoader:
import torchvision.datasets as dset
import torchvision.transforms as transforms
root = './data'
if not os.path.exists(root):
os.mkdir(root)
# 这里的0.5,1.0是对数据进行归一化时使用的mean和variance
# 在MNIST里面,图片的均值和方差分别是:0.1307,0.3081,所以这里提供的值不是对的
trans = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (1.0,))])
# if not exist, download mnist dataset
train_set = dset.MNIST(root=root, train=True, transform=trans, download=True)
test_set = dset.MNIST(root=root, train=False, transform=trans, download=True)
batch_size = 100
train_loader = torch.utils.data.DataLoader(
dataset=train_set,
batch_size=batch_size,
shuffle=True)
test_loader = torch.utils.data.DataLoader(
dataset=test_set,
batch_size=batch_size,
shuffle=False)
定义网络
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 输入图像channel:1;输出channel:6;5x5卷积核
# 这里构建的网络的padding是1,但是真实的一般使用的是2(外层补上两圈0),输入是32x32
self.conv1 = nn.Conv2d(1, 6, 5)
self.conv2 = nn.Conv2d(6, 16, 5)
# an affine operation: y = Wx + b
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
# 2x2 Max pooling, 先卷积,然后调用relu激活函数,再最大值池化操作
x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2))
# If the size is a square you can only specify a single number
# 第二次卷积+池化操作
x = F.max_pool2d(F.relu(self.conv2(x)), 2)
# 重新塑形,将多维数据重新塑造为二维数据,256*400
x = x.view(-1, self.num_flat_features(x))
#第一个全连接
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
def num_flat_features(self, x):
# x.size()返回值为(256, 16, 5, 5),size的值为(16, 5, 5),256是batch_size
# x.size返回的是一个元组,size表示截取元组中第二个开始的数字
size = x.size()[1:] # 除去批大小维度的其余维度
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
print(net)
# 构建的网络
# Net(
# (conv1): Conv2d(1, 6, kernel_size=(5, 5), stride=(1, 1))
# (conv2): Conv2d(6, 16, kernel_size=(5, 5), stride=(1, 1))
# (fc1): Linear(in_features=400, out_features=120, bias=True)
# (fc2): Linear(in_features=120, out_features=84, bias=True)
# (fc3): Linear(in_features=84, out_features=10, bias=True)
# )
这里卷积层的构建调用的是.Conv2d()函数:
# https://pytorch.org/docs/stable/nn.html#conv2d
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1,
groups=1, bias=True, padding_mode='zeros')
# 参数列表
# in_channels (int) – Number of channels in the input image
# out_channels (int) – Number of channels produced by the convolution
# kernel_size (int or tuple) – Size of the convolving kernel
# stride (int or tuple, optional) – Stride of the convolution. Default: 1
# padding (int or tuple, optional) – Zero-padding added to both sides of the input. Default: 0
# padding_mode (string, optional) – zeros
# dilation (int or tuple, optional) – Spacing between kernel elements. Default: 1
# groups (int, optional) – Number of blocked connections from input channels to output channels. Default: 1
# bias (bool, optional) – If True, adds a learnable bias to the output. Default: True
上面还使用到了view函数,用于对数组进行reshape,类似于numpy里面的resize函数。作用:把原先tensor的数据排成一个一维的数据,然后按照view提供的参数转换为其他维度的张量。
# 【1】即使原始的张量维度不一样,但是提供的view参数一致,那么转换后的张量也是一样的
a=torch.Tensor([[[1,2,3],[4,5,6]]])
b=torch.Tensor([1,2,3,4,5,6])
print(a.view(1,6))
print(b.view(1,6))
# tensor([[1., 2., 3., 4., 5., 6.]])
# 【2】从2x3转换为3x2
a=torch.Tensor([[[1,2,3],[4,5,6]]])
print(a.view(3,2))
# tensor([[1., 2.],
# [3., 4.],
# [5., 6.]])
# 【3】view的参数不能为空,用-1代替未知的
# -1表示自动推断的
# 比如:原始是2x3=6的,现在view第一个参数是1,转换为二维的,那么-1自动推断此维度为6,所以转换后的张量是1x6
a = torch.Tensor(2,3)
print(a)
# tensor([[0.0000, 0.0000, 0.0000],
# [0.0000, 0.0000, 0.0000]])
print(a.view(1,-1))
# tensor([[0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000]])
定义损失函数和优化器
import torch.optim as optim
# https://pytorch.org/docs/stable/nn.html#loss-functions
# 这里定义了各种不同的损失函数
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
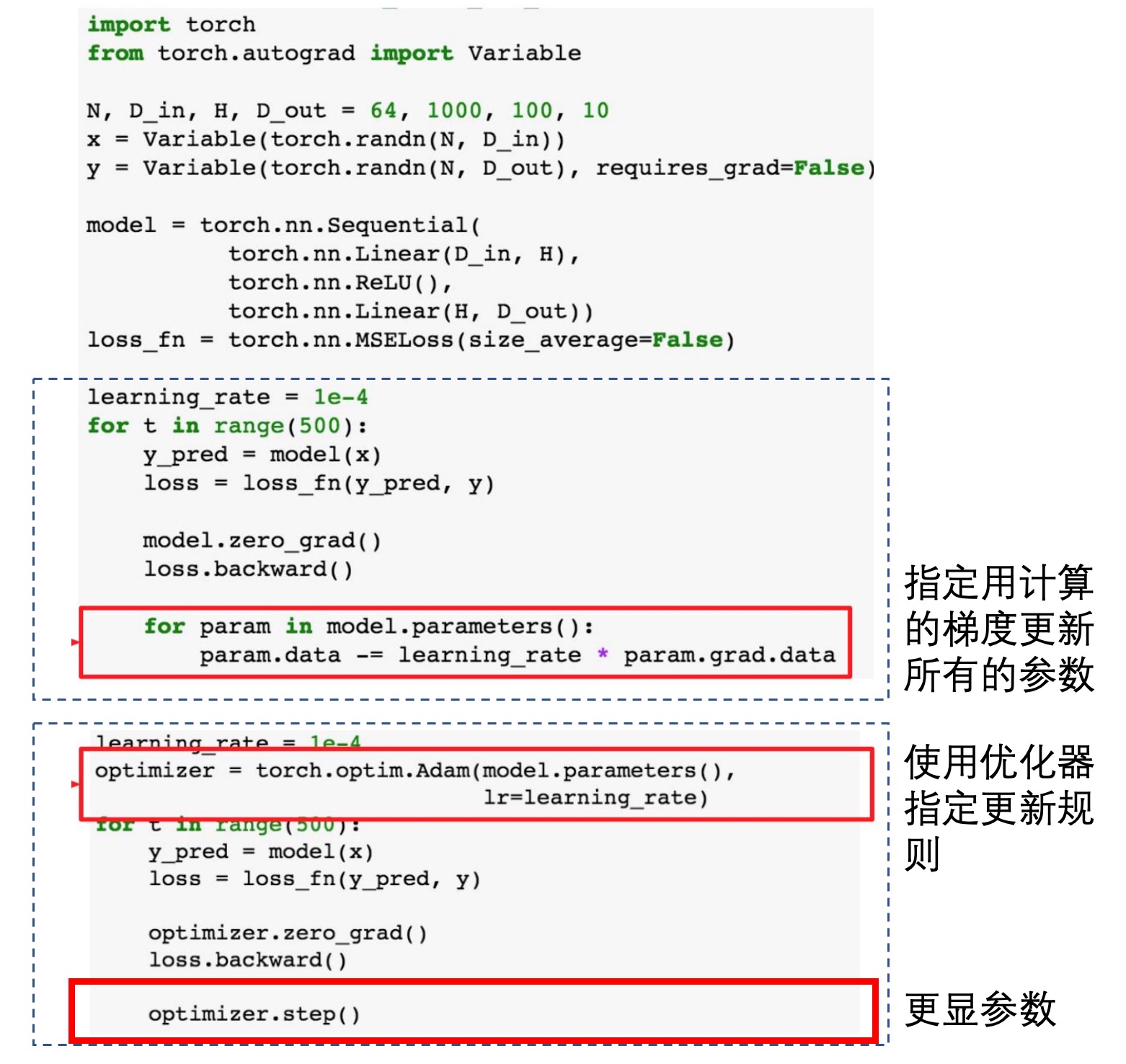
最好是直接调用优化器,但是最基础的也可手动指定更新(不推荐):
训练网络:
for epoch in range(2): # loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs
inputs, labels = data
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' % (epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0
print('Finished Training')
# [1, 2000] loss: 2.182
# [1, 4000] loss: 1.819
# [1, 6000] loss: 1.648
# [1, 8000] loss: 1.569
# [1, 10000] loss: 1.511
# [1, 12000] loss: 1.473
# [2, 2000] loss: 1.414
# [2, 4000] loss: 1.365
# [2, 6000] loss: 1.358
# [2, 8000] loss: 1.322
# [2, 10000] loss: 1.298
# [2, 12000] loss: 1.282
# Finished Training
评估模型
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %d %%' % (
100 * correct / total))
# Accuracy of the network on the 10000 test images: 55 %
cheatsheet
- Pytorch official : https://pytorch.org/tutorials/beginner/ptcheat.html
- Pytorch_Tutorial : https://web.cs.ucdavis.edu/~yjlee/teaching/ecs289g-winter2018/Pytorch_Tutorial.pdf
参考
Read full-text »
【4-1】卷积神经网络
2019-02-20
目录
计算机视觉
- 深度学习的兴奋点:
- (1)CV的高速发展标志着新型应用产生的可能
- (2)新的神经网络结构与算法,启发创造CV和其他领域的交叉成果
- 例子:
- 图片分类(图片识别):识别出一只猫
- 目标检测:物体的具体位置,比如无人车中车辆的位置以避开
- 图片风格迁移:把一张图片转换为另一种风格的
- 挑战:
- 数据量大:3通道64x64大小(64x64x3=12288)
- 特征向量维度高,权值矩阵或者参数巨大
- 参数巨大:难以获得足够的数据防止过拟合
- 巨大的内存需求
边缘检测示例
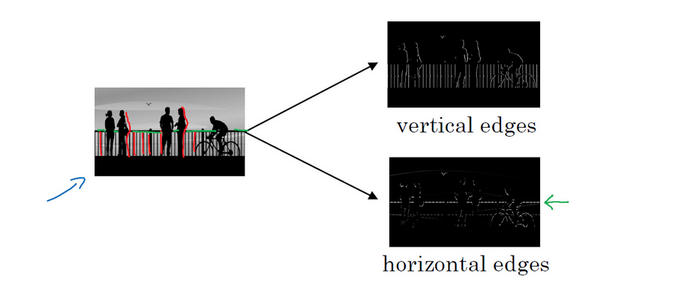
- 边缘检测例子:
- 可能先检测竖直的边缘
- 再检测水平的边缘
- 如何检测?
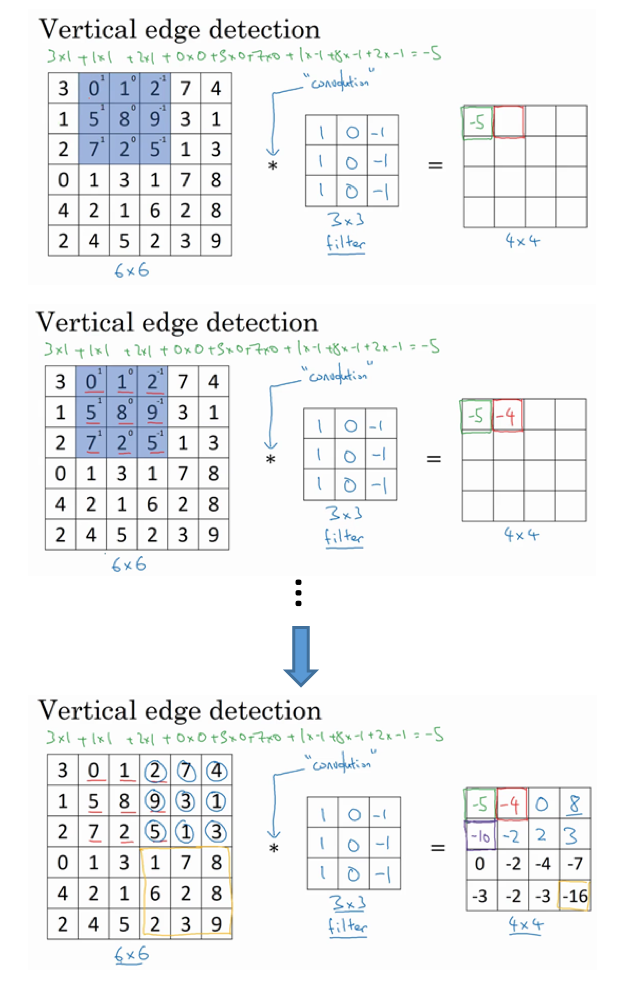
- 使用过滤器(核,filter)
- 通过一个过滤器去和图片进行卷积,得到其卷积结果6x6的矩阵和3x3的过滤器卷积运算后得到4x4的新矩阵
- 左边:图片,中间:过滤器,右边:另一张图片。这里的过滤器其实就是垂直边缘检测器。
- 为啥是垂直边缘检测器?
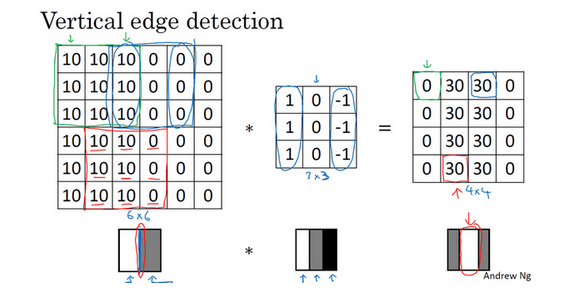
- 换个图片例子:原始图片大小还是6x6的,但是里面的像素值变成现在的样子
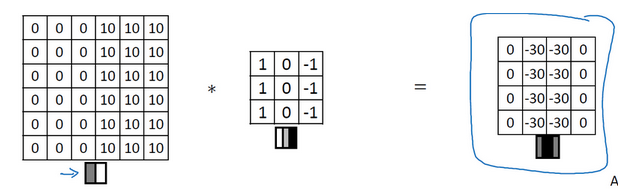
- 原始图片:左侧是10,右侧全为0,对应的图像就是左侧近乎于白色(像素值大,比较亮),右侧近乎于灰色(像素值小,比较暗)。这里左右两侧的中间可以看到一个明显的垂直边缘,达到从白到黑的过度。
- 过滤器:此时左侧全为1(最亮,白色),中间全为0(一般,灰色),右侧全为-1(最小,黑色)。
- 卷积后:得到的图像左右两边全为0,中间为30,对应图像是左右两边近乎灰色(偏暗),中间是白色(偏亮)。
- 中间的两列其实对应的就是整个图像的一条亮线,只是由于这里图片太小(4x4),所以看不太出来。如果是1000x1000的,那么可以明显看到卷积之后是可以看到正中间有一条垂直边缘亮线的。
- 因此说:此时用到的这个过滤器可以检测图片中的额垂直边缘。
- 过度的变化可被检测到:
- 上面原始图片是从亮(10)到暗(0)的过度,如果换成从暗(0)到亮(1)的过度呢?检测得到的图片是怎么样的?
- 可以看到:得到的图片中间被翻转了,不再是原来的由亮(白色)向暗过度,而是由暗(黑色)向亮过度。如果不考虑两者区别,可取绝对值。
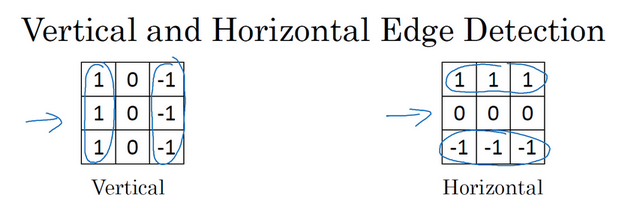
- 垂直检测与水平检测:
- 垂直:1 =》 0 =》 -1,左边亮,右边暗
- 水平:1 =》 0 =》 -1,上面亮,下面暗
- 衍生:
- 不同的3x3的滤波器:
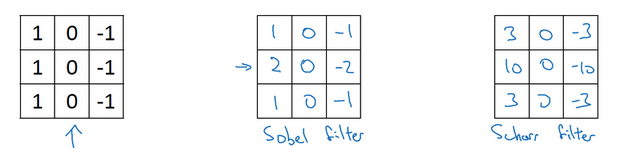
- Sobel过滤器:增加中间一行元素的权重,使得结果具有更高的鲁棒性
- Scharr过滤器:属于一种垂直边缘检测,如果将其翻转90度,就能得到对应水平边缘检测
- 不同的3x3的滤波器:
- 为什么可以学习到图像的特征?
- 上面列举的可以检测到垂直或者水平的边缘
- 还有的其他过滤器可以学习45°、70°或者73°,甚至是任何角度的边缘
- 矩阵所有数字设置为参数,通过数据反馈,让神经网络自动学习,就可以学习到一些低级的特征,比如各种不同角度的边缘特征等。
- 过滤器数字参数化的思想,是CV中最为有效的思想之一
Padding
- 直接卷积的缺点:
- 输出缩小。每次卷积操作之后,图像就会缩小,比如从开始的6x6变为4x4,最后变为1x1等。
- 丢掉了图像边缘位置的许多信息。在角落或者边缘区域的像素点在输出中采用较少。
- 解决上述问题:
- 卷积前填充
- p是填充数量,习惯用0进行填充。填充后的输出:(n+2p-f+1)x(n+2p-f+1),此时输出的图像和原来可能更接近了。
- 边缘发挥小作用的缺点也被弱化。
- 填充像素p:
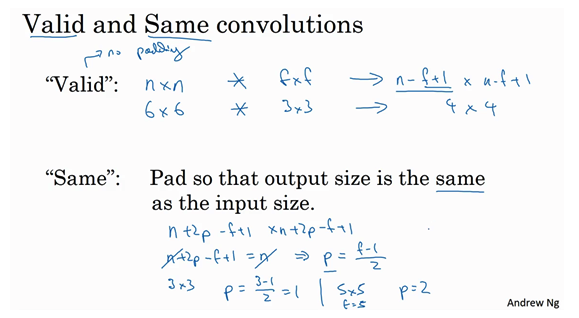
- Valid卷积:不填充。输出:(n-f+1)x(n-f+1)
- Same卷积:填充后输出大小和输入大小一样。输出:(n+2p-f+1)x(n+2p-f+1),此时前后大小相等有:n+2p-f+1=n => p=(f-1)/2。所以当f为奇数时,选择合适的填充p大小,可以使得卷积前后大小相等。
- 为什么过滤器通常是奇数?
- 习惯:f通常为奇数。
- 如果f是偶数,只能使用一些不对称的填充
- 奇数过滤器有一个中心点,便于指出过滤器的位置
卷积步长
- 基本操作:步幅(stride)
- 例子:一个7x7的图像,使用一个3x3的过滤器,步幅f=2,padding=0
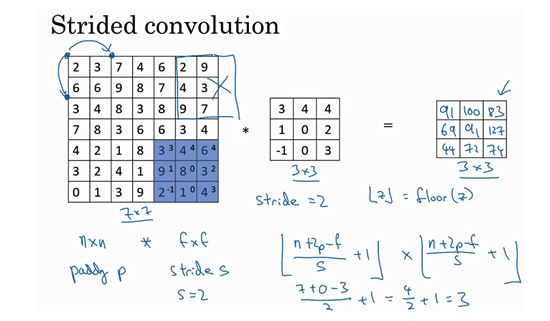
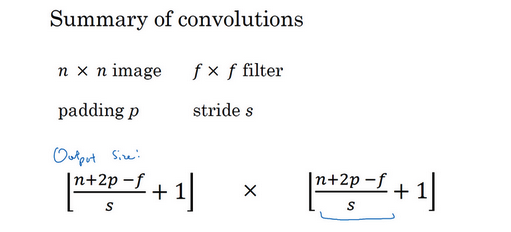
- 公式:
- 输出:\((\frac{n+2p-f}{s}+1) \times (\frac{n+2p-f}{s}+1)\)
- 如果商不为整数怎么办?
- 向下取整:对z进行地板除
- 惯例:只有上面的每一个篮框完全包括在图像或填充完的图像内部时,才对它进行运算。如有有任意的一个篮框移动到了外面,那么就不要进行相乘操作。
- 输出维度总结:
三维卷积
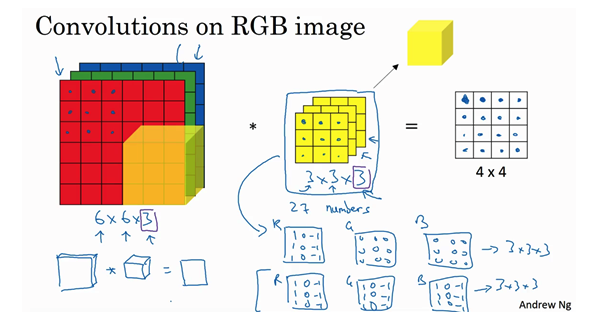
- 过滤器是三维的,对应RGB三个通道
- 例子:
- 输入:6x6x3的图像
- 过滤器:3x3x3
- 输出:4x4x1.注意不是4x4x3,对于每一个过滤器立方体,总共有27个数字,这27个数字对应相乘然后求和得到一个数字,称为新图像的一个元素。
- 应用:比如如果绿色和蓝色通道全为0,红色通道设置一个垂直检测器,那么整个三维的过滤器就是一个只对红色通道有用的垂直边界检测器。
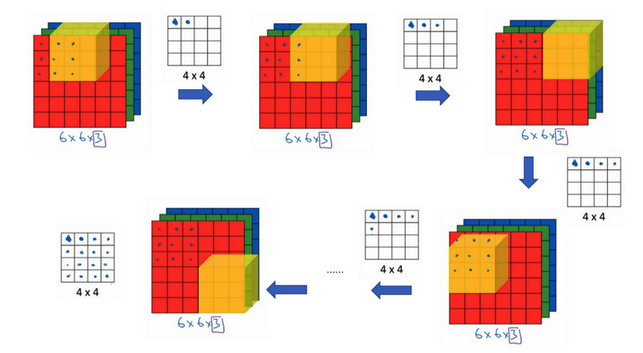
- 多过滤器:
- 一个三维立体过滤器实现一个特征检测
- 同时使用多个过滤器检测到不同的特征
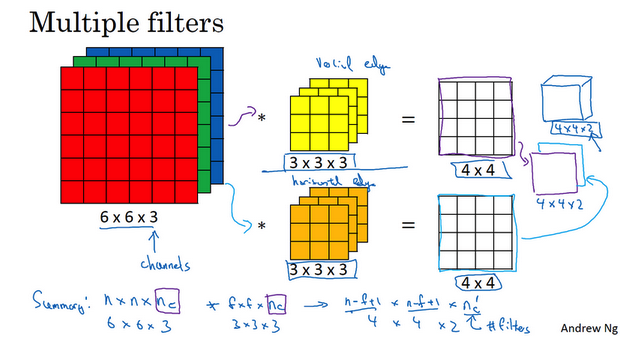
- 输出维度:
- 输入:n x n x nc(通道数)
- 卷积:f x f x nc,惯例nc是相等的
- padding:0
- stride:1
- 输出:(n-f+1) x (n-f+1) x nc’,nc’是下一层的通道数,也就是使用的过滤器的个数。
单层卷积网络
- 如何构建卷积?
- 根据输入图像,卷积得到卷积值,然后经过激活函数。
- 示例:a0到a1的演变:
- 先执行线性函数
- 所有元素相乘做卷积:运用线性函数再加上偏差
- 应用激活函数ReLU
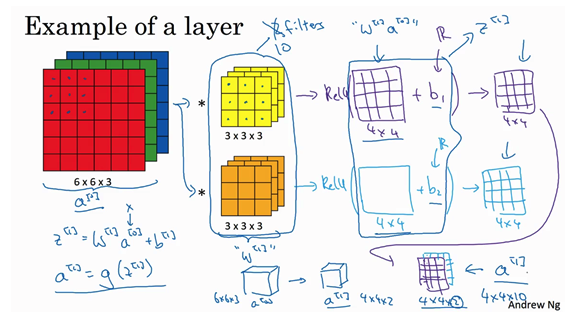
- 参数个数?
- 输入:1000x1000x3
- 过滤器:10个3x3x3的
- 参数:每一个过滤器是28个参数(3x3x3+1偏差),10个过滤器就是280个参数。【参数个数与输入图像的大小是无关的】
- 不管输入图片大小,参数都很少,这是卷积神经网络的避免过拟合的特性。
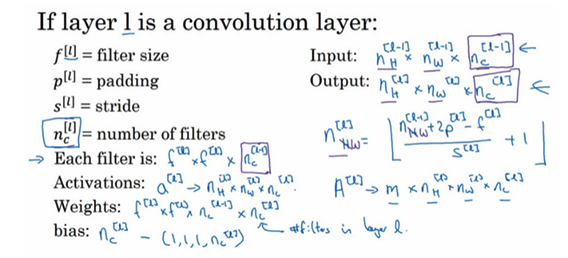
- 卷积层各种标记:
- 输入
- 过滤器大小
- padding
- stride
- 过滤器数目
- 输出:通道数量就是此层中过滤器的数量
- 如何确定权重参数?
- 参数就是每个过滤器的数值的权重
- 数据拟合
简单卷积网络示例
- 通常一个卷积神经网络包含3层:
- 卷积层:CONV
- 池化层:POOL
- 全连接层:FC
- 一个简单的卷积网络示例:
- 这里是展示了几个卷积层
- 通过不同的卷积层之后图片的大小、每个卷积的设置等
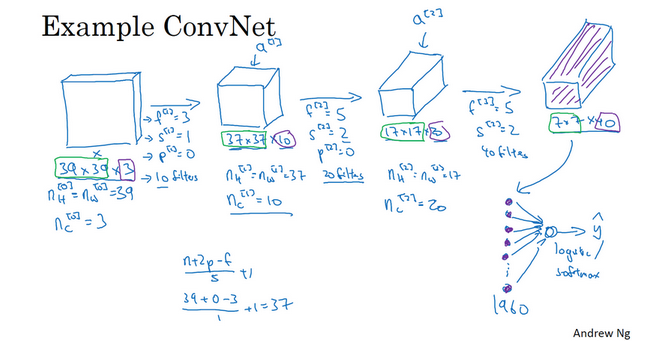
- 【输入-卷积层1】:
- 输入:39x39x3
- 卷积大小:f=3
- 步幅:s=1
- 填充:p=0.(不填充,属于valid卷积)
- 卷积数目:10
- 输出:37x37x10,37=(n+2p-f)/s + 1 = (39+0-3)/1 + 1=37, 10是使用10个过滤器,所以输出会有10个通道(三维堆叠,每一层是一个过滤器)
- 【卷积层1-卷积层2】:
- 输入:37x37x10
- 卷积大小:f=5
- 步幅:s=2
- 填充:p=0.(不填充,属于valid卷积)
- 卷积数目:20
- 输出:17x17x20,37=(n+2p-f)/s + 1 = (37+0-5)/2 + 1=17, 20是使用20个过滤器,所以输出会有20个通道(三维堆叠,每一层是一个过滤器)
- 【卷积层2-卷积层3】:
- 输入:17x17x20
- 卷积大小:f=5
- 步幅:s=2
- 填充:p=0.(不填充,属于valid卷积)
- 卷积数目:40
- 输出:7x7x40,37=(n+2p-f)/s + 1 = (17+0-5)/2 + 1=7, 40是使用40个过滤器,所以输出会有40个通道(三维堆叠,每一层是一个过滤器)
- 经过3个卷积之后,为图片提取7x7x40=1960个特征。可对提取的特征进行处理,比如展开向量,然后过逻辑回归或者softmax回归等。
池化层
- 池化层:
- 缩减模型大小
- 提高计算速度
- 提高所提取特征的鲁棒性
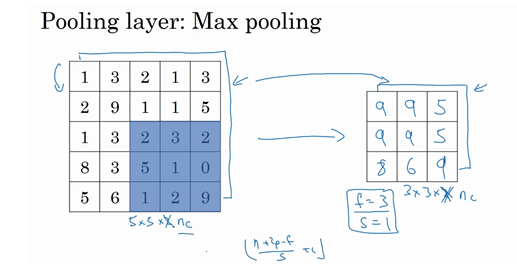
- 输出大小:
- 公式和前面的卷积一样
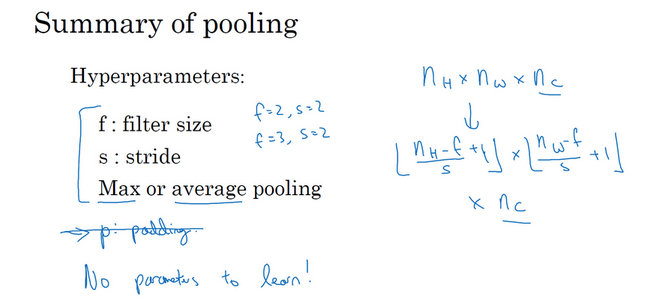
- 池化也是需要顶一个过滤器的大小、步幅、填充的
- 输出大小即:(n+2p-f)/s + 1
- 计算神经网络某层的静态属性,没有参数需要学习,只有一组超参数(过滤器大小f和步幅s)
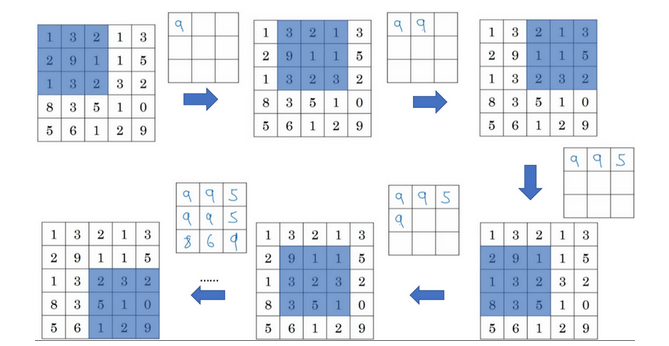
- 最大池化:
- 在任何一个象限内提取到某个特征,保留其最大值
- 很少用到超参数padding,p=0最常用
- 三维池化:
- 输入是三维的,那么输出也是三维的
- 对每个通道分别执行池化操作
- 平均池化:
- 选取每个过滤器的平均值
- 不太常用
CNN示例
- 常见模式:
- 一个或者多个卷积层跟随一个池化层
- 然后一个或者多个卷积层再跟随一个池化层
- 然后是几个全连接层
- 最后是一个softmax
- 一个跟LeNet5很像的CNN:
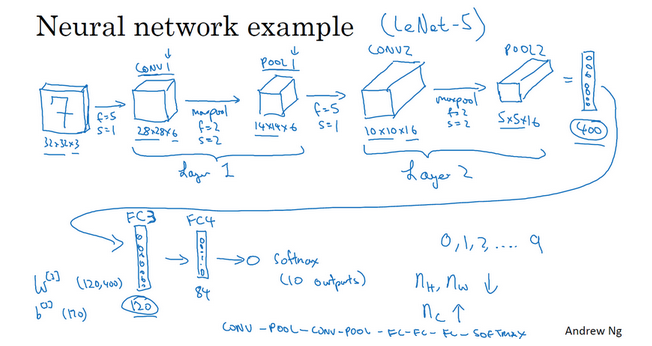
- Layer1:一个卷积+一个池化。也有的把他们作为单独的层。
- 计算神经网络多少层:通常只统计具有权重和参数的层,池化层没有权重和参数(只有超参数)
- 尽量不要自己设置超参数,而是查看文献中别人采用了哪些超参数
- 激活值形状、大小、参数数量:
- 比如上面的网络,可以列出下表
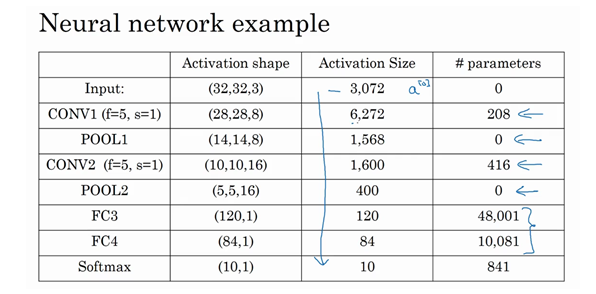
- 随着神经网络加深,激活值尺寸会逐渐变小
- 池化层和最大池化层没有参数
- 卷积层的参数相对较少
- 比如上面的网络,可以列出下表
为什么使用卷积?
- 卷积层 vs 全连接层:
- 参数共享:适用于图片的某个区域的检测器,也是用于图片的其他区域进行特征检测
- 稀疏连接:卷积后的某个元素值,只与原来图像中的某些个数值有关(fxf个),而与其他的像素值无关
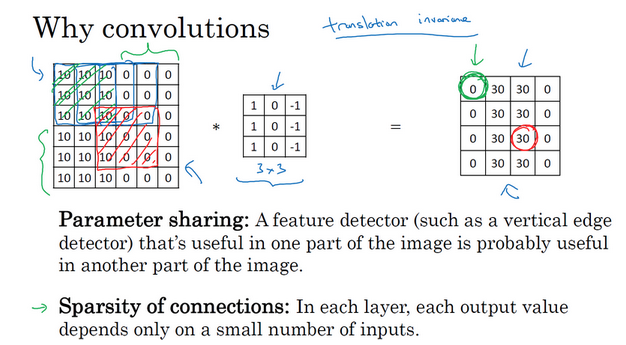
- 优点:
- 减少参数
- 使用更小的训练集训练
- 预防过拟合
- 善于捕捉平移不变:移动有限个像素,鉴定的猫依旧清晰可见
参考
Read full-text »
Latest articles
Links
- ZhangLab , RISE database , THU life , THU info
- Data analysis: pandas , numpy , scipy
- ML/DL: sklearn , sklearn(中文) , pytorch
- Visualization: seaborn , matplotlib , gallery
- Github: me